Towards a Science of Scaling Agent Systems
Yubin Kim$^{1,3,\dagger}$, Ken Gu$^{1}$, Chanwoo Park$^{3}$, Chunjong Park$^{2}$, Samuel Schmidgall$^{2}$, A. Ali Heydari$^{1}$, Yao Yan$^{1}$, Zhihan Zhang$^{1}$, Yuchen Zhuang$^{2}$, Yun Liu$^{1}$, Mark Malhotra$^{1}$, Paul Pu Liang$^{3}$, Hae Won Park$^{3}$, Yuzhe Yang$^{1}$, Xuhai Xu$^{1}$, Yilun Du$^{1}$, Shwetak Patel$^{1}$, Tim Althoff$^{1}$, Daniel McDuff$^{1}$, Xin Liu$^{1,\dagger}$
$^{1}$ Google Research
$^{2}$ Google DeepMind
$^{3}$ Massachusetts Institute of Technology
$^{\dagger}$ Corresponding Author
Correspondence: [email protected], [email protected]Abstract
Agents, language model (LM)-based systems that are capable of reasoning, planning, and acting are becoming the dominant paradigm for real-world AI applications. Despite this widespread adoption, the principles that determine their performance remain underexplored, leaving practitioners to rely on heuristics rather than principled design choices. We address this gap by deriving quantitative scaling principles for agent systems. We first formalize a definition for agentic evaluation and characterize scaling laws as the interplay between agent quantity, coordination structure, model capability, and task properties. We evaluate this across four diverse benchmarks: Finance-Agent, BrowseComp-Plus, PlanCraft, and Workbench, spanning financial reasoning, web navigation, game planning, and workflow execution. Using five canonical agent architectures (Single-Agent System and four Multi-Agent Systems: Independent, Centralized, Decentralized, Hybrid), instantiated across three LLM families, we perform a controlled evaluation spanning 180 configurations, standardizing tools, prompt structures, and token budgets to isolate architectural effects from implementation confounds. We derive a predictive model using empirical coordination metrics, including efficiency, overhead, error amplification, and redundancy, that achieves cross-validated $R^2=0.524$, enabling prediction on unseen task domains by modeling task properties rather than overfitting to a specific dataset. We identify three dominant effects: (1) a tool-coordination trade-off: under fixed computational budgets, tool-heavy tasks suffer disproportionately from multi-agent overhead. (2) a capability saturation: we observe that coordination yields diminishing or negative returns ($\beta=-0.404, p<0.001$) once single-agent baselines exceed an empirical threshold of $\sim$45%. (3) topology-dependent error amplification: independent agents amplify errors 17.2$\times$ through unchecked propagation, while centralized coordination contains this to 4.4$\times$. Crucially, coordination benefits are task-contingent. Centralized coordination improves performance by 80.8% on parallelizable tasks like financial reasoning, while decentralized coordination excels on dynamic web navigation (+9.2% vs. +0.2%). Yet for sequential reasoning tasks, every multi-agent variant we tested degraded performance by 39–70%. The framework predicts the optimal coordination strategy for 87% of held-out configurations. Out-of-sample validation on GPT-5.2, released after our study, achieves MAE=0.071 and confirms four of five scaling principles generalize to unseen frontier models, providing a quantitatively predictive framework for agentic scaling based on measurable task properties.
Executive Summary: The rapid rise of AI agents—systems powered by large language models that reason, plan, and act in real-world settings—has transformed applications from financial analysis to web navigation and software development. Yet, as these agents handle increasingly complex tasks involving tools and environments, a key challenge persists: practitioners often rely on guesswork to decide whether a single agent suffices or if teams of agents, which promise collaboration but add coordination costs, will perform better. This uncertainty wastes resources and delays deployment, especially as model capabilities advance quickly, making the value of multi-agent setups unclear. Addressing this now is critical to build reliable AI systems that scale efficiently without overcomplicating simple problems.
This document aims to establish clear scaling principles for agent performance by examining how the number of agents, their coordination style, underlying model strength, and task features interact to drive results. It tests whether multi-agent teams consistently outperform single agents, under what conditions they excel or fail, and how to predict the best setup for any given task.
The authors conducted a rigorous, controlled study across four diverse benchmarks representing real agentic tasks: financial reasoning, web browsing, game planning, and workplace workflows. They compared five agent designs—a single-agent baseline and four multi-agent variants (independent teams that aggregate outputs without talking, centralized setups with a lead coordinator, decentralized peer discussions, and a hybrid of both)—using models from three major providers (OpenAI, Google, Anthropic) at varying ability levels. This spanned 180 setups, with identical tools, prompts, and total computing budgets to fairly isolate the impact of team structure. Evaluations drew from hundreds of task instances per benchmark, focusing on success rates while tracking coordination costs like message volume and error spread.
The study uncovered three main patterns shaping agent performance. First, a tool-coordination trade-off: tasks needing many tools, like workflow execution, see multi-agent setups degrade efficiency by 2-6 times due to overhead, dropping success rates up to 70% compared to single agents. Second, capability saturation: once a single agent hits about 45% success, adding team coordination yields flat or negative gains—up to a 40% drop—because costs outweigh benefits from already strong models. Third, error handling varies sharply by design: independent teams amplify mistakes 17 times through unchecked spread, while centralized coordination limits this to 4.4 times by validating outputs. Overall, multi-agent gains were task-specific—up to 81% improvement on parallel financial tasks with centralized teams, 9% on dynamic web navigation with decentralized ones—but universal drops of 39-70% on sequential planning tasks across all team types. A predictive formula, built from these coordination measures, explains over half the performance variation and correctly picks the best design for 87% of new scenarios.
These results challenge the common view that more agents always help complex tasks, showing instead that mismatched teams can inflate costs and risks without boosting reliability or speed. For instance, in finance or web search where subtasks can run in parallel, multi-agent designs cut errors and timelines by enabling divided labor, potentially saving deployment expenses by 20-50% through fewer failed runs. But for chained reasoning like planning, single agents prove safer and cheaper, avoiding the 3-6 times higher token use (and thus costs) of teams. This task-dependent insight matters for decisions on AI investment: it prevents over-engineering, improves safety in high-stakes areas like trading or automation, and aligns systems with performance needs rather than hype.
Leaders should use the study's formula to assess tasks upfront—measure decomposability, tool needs, and single-agent baselines—to select architectures: opt for centralized or decentralized multi-agents on parallelizable problems for gains up to 80%, but stick to single agents on sequential ones to avoid 40-70% losses. Trade-offs include higher upfront setup for teams (e.g., coordination protocols) versus their parallel speed on suitable tasks; for borderline cases, pilot single versus small teams (2-3 agents) to confirm. Further work is needed, such as testing on more benchmarks like robotics or long-term planning, optimizing prompts per model, and exploring mixed-model teams for diversity.
While the controlled design builds strong credibility within tested models and tasks, limitations include coverage of only four benchmarks and teams up to nine agents, plus assumptions of identical models and unoptimized prompts, which may shift results in varied real-world use. Confidence is high for the core principles—they hold across providers and generalize to a newer model with low error—but caution applies to extreme scales or novel domains where overhead could dominate more.
![**Figure 1:** **Agent Scaling across model intelligence and system architectures.** Average performance (%) across four agentic benchmarks improves consistently with increasing model *Intelligence Index* (see [@sec:appendix-intelligence-index]) across three major LLM families (OpenAI, Google, and Anthropic) under different agent configurations. Single Agent System (**SAS**) serves as reference trajectories, while Multi Agent System (**MAS**) variants (Centralized, Decentralized, Independent, and Hybrid) reveal distinct scaling behaviors (see Table 2 for architecture comparisons). All percentage deltas annotated in the figure (e.g., +8.7%, +8.1%, –4.6%) indicate relative performance change of the best-performing MAS variant compared to the SAS baseline at the same Intelligence Index. Centralized and hybrid coordination generally yield superior scaling efficiency, suggesting that collaborative agentic structures amplify capability gains more effectively than individual scaling alone.](https://ittowtnkqtyixxjxrhou.supabase.co/storage/v1/object/public/public-images/jupyjw3t/agent-scaling_main_v5.png)
1. Introduction
Section Summary: Agents are AI systems powered by language models that reason, plan, and act in loops, learning from feedback to handle tasks like coding, web navigation, and medical decisions. As challenges become more complex and interactive, researchers have turned to multi-agent systems, where teams of agents collaborate, assuming they outperform solo agents, but without a clear way to predict when adding more agents boosts or hinders performance, leading to guesswork in real-world use. The key lies in identifying truly "agentic" tasks that demand ongoing environmental interaction, partial information, and adaptive adjustments—unlike static puzzles—yet most evaluations of multi-agent setups test on simpler, non-interactive problems, overlooking coordination costs and error spreads that can undermine collaboration.
Agents ([1]), language model-driven systems that operate through iterative cycles of reasoning, planning, and acting, adapting their behavior based on environmental or tool-generated feedback, have achieved remarkable performance in diverse applications, from code generation ([2, 3]), web browsing ([4, 5]), medical decision-making ([6, 7, 8]), finance ([9]), sustainability ([10]), to scientific discovery ([11, 12]). As tasks grow in complexity and require sustained environmental interaction, the field has increasingly turned to multi-agent systems (MAS), relying on the premise that specialized collaboration consistently outperforms single-agent systems (SAS) ([13, 14]). Previous work has made positive claims about multi-agent systems: "More agents is all you need" ([15]), suggesting that agent collaboration follows collaborative scaling principles ([16]), and that MAS consistently outperforms single-agent systems (SAS) on complex tasks ([17, 18]). Yet, despite rapid adoption, there remains no principled quantitative framework to predict when adding agents amplifies performance and when it erodes it. This gap leaves practitioners relying on heuristics, hindering both the emergence of a science of agent systems and, critically for real-world deployment, the ability to determine when multi-agent coordination provides genuine value over simpler single-agent alternatives.
To determine when multi-agent coordination provides benefit, we first establish which task categories require agentic capabilities. A critical prerequisite is distinguishing between agentic and non-agentic evaluation paradigms. Expanding from the Agentic Benchmark Checklist (ABC) introduced in ([19]), we characterize agentic tasks as those requiring: (i) sustained multi-step interactions with an external environment, (ii) iterative information gathering under partial observability, and (iii) adaptive strategy refinement based on environmental feedback.
These characteristics differentiate tasks like web browsing ([4]), financial trading ([9]), software engineering ([20]), and interactive planning ([21]) from traditional static benchmarks, tasks solvable through single-shot reasoning without environmental feedback, which lack external environments, are fully observed, or require identical solution strategies ([22, 23]). This distinction matters profoundly because, while recent agentic benchmarks have emerged (e.g., SWE-Bench ([20]), $\tau^2$-Bench ([24]), TerminalBench), multi-agent system evaluations have been conducted predominantly on non-agentic tasks, potentially providing misleading guidance about when collaboration provides value. This distinction is practically consequential: while LLMs achieve high accuracy on isolated code generation tasks like HumanEval ([25]), real-world deployment requires agentic capabilities—iterative debugging, repository navigation, and adaptive strategy refinement—as exemplified by interactive coding assistants (e.g., Cursor, Copilot Workspace). Multi-agent systems that show monotonic improvement with team size on static benchmarks (reaching 89% on HumanEval with five agents) exhibit fundamentally different scaling behavior when evaluated on tasks requiring sustained environmental interaction, where coordination overhead and error propagation dynamics dominate.
Fundamentally, this distinction reflects a trade-off between context integration and diversity ([17, 26]). Single-agent systems maximize context integration by maintaining a unified memory stream in which all reasoning steps share full access to prior history, enabling effectively constant-time access to global context. In contrast, multi-agent systems impose intrinsic information fragmentation ([13]): while parallel agents enable diverse exploration, they incur an unavoidable coordination tax in which the global context must be compressed into inter-agent messages. This lossy communication increases synchronization overhead and cognitive load ([?]), fundamentally altering the scaling behavior of collaboration.
The underlying dynamics explain this discrepancy: on agentic tasks, coordination overhead scales with interaction depth, agents operate on progressively divergent world states, and errors cascade through execution chains rather than being corrected through voting. Recent work has identified cases where single strong models match or exceed multi-agent systems ([27]), yet the evaluation literature provides limited guidance on what factors determine collaborative success, whether semantic diversity predicts team performance, how architectural choices shape coordination costs, or whether agents can detect and correct failures in extended interactions.
The problem is further compounded by rapid progress in frontier model capabilities. As base LLMs gain extended context windows, sophisticated tool use, and improved self-reflection, the unique value proposition of multi-agent collaboration becomes unclear. The answer likely depends on task characteristics and architectural choices that remain to be systematically quantified.
Two fundamental challenges hinder progress toward principled multi-agent design. First, existing MAS evaluations compare architectures using different prompts, tools, or computational budgets, conflating architectural effects with implementation choices and precluding clean causal attribution. Second, evaluations focus exclusively on final accuracy metrics without examining process dynamics such as coordination overhead, error propagation, and information flow that determine whether collaboration succeeds or fails. We know from human team performance ([28, 29]) that team effectiveness depends on composition, coordination mechanisms, and member differentiation. Yet we lack comparable empirical understanding of how these principles translate to artificial agents, leaving practitioners without quantitative guidance for architecture selection.
To address these challenges, we present a controlled evaluation establishing the principles for agent coordination. Our experimental design isolates architectural effects by controlling for implementation confounds which maintains identical task prompts, tools, and computational budgets across all configurations, while systematically varying only coordination structure and model capability. We evaluate five canonical architectures: Single Agent System (SAS) and four Multi-Agent variants (Independent, Centralized, Decentralized, Hybrid) instantiated across three major LLM families (OpenAI, Google, Anthropic) spanning diverse capability levels, on four representative agentic benchmarks: (1) web browsing (BrowseComp-Plus ([30])), (2) financial analysis (Finance-Agent ([31])), (3) game planning (PlanCraft ([21])), and (4) realistic workplace tasks (Workbench ([32])). Across $N{=}180$ controlled configurations with matched token budgets, we derive a scaling principle across tested domains quantifying how performance emerges from empirically measured coordination properties.
In contrast to prior claims that "more agents is all you need", our evaluation reveals that the effectiveness of multi-agent systems is governed by quantifiable trade-offs between architectural properties and task characteristics. We establish a predictive framework using empirical coordination metrics: efficiency (success/overhead ratio), error amplification factors, message density and redundancy, achieving cross-validated $R^2{=}0.524$ (explaining more than half of the performance variance on held-out data) without dataset-specific parameters. Critically, this framework generalizes beyond training configurations: the model correctly predicts optimal architectures for 87% of held-out task configurations, demonstrating extrapolation to unseen task structures.
Our analysis identifies three patterns. First, a tool-coordination trade-off ($\beta{=}{-}0.267$, $p{<}0.001$): tool-heavy tasks (e.g., 16-tool software engineering) suffer from multi-agent coordination overhead, with efficiency penalties compounding as environmental complexity increases. Second, a capability ceiling ($\beta{=}{-}0.404$, $p{<}0.001$): tasks where single-agent performance already exceeds 45% accuracy experience negative returns from additional agents, as coordination costs exceed diminishing improvement potential. Third, we observe architecture-dependent error amplification. Independent systems amplify errors $17.2\times$ through unchecked error propagation, where individual mistakes cascade to the final output. Centralized coordination, however, contains this to $4.4\times$ by enforcing validation bottlenecks that intercept errors before aggregation. Performance spans ${+}81%$ relative improvement (structured financial reasoning under centralized coordination) to ${-}70%$ degradation (sequential planning under independent coordination), demonstrating that architecture-task alignment, not number of agents, determines collaborative success. Importantly, optimal architectures vary systematically: decentralized coordination benefits tasks requiring parallel exploration of high-entropy search spaces (dynamic web navigation: ${+}9.2%$), while all multi-agent variants universally degrade performance on tasks requiring sequential constraint satisfaction (planning: ${-}39%$ to ${-}70%$), where coordination overhead fragments reasoning capacity under fixed computational budgets. We synthesize these findings into quantitative architecture selection rules (Section 4.3) achieving 87% prediction accuracy on held-out configurations. The underlying mechanisms driving these patterns are interpretable: the tool-coordination trade-off arises because multi-agent systems fragment the per-agent token budget, leaving insufficient capacity for complex tool orchestration; the capability ceiling reflects that coordination overhead becomes a net cost when baseline performance is already high; and architecture-dependent error amplification stems from the presence or absence of validation bottlenecks that catch errors before propagation. These mechanistic insights enable practitioners to move from architectural heuristics to principled, measurement-driven deployment decisions.
Our primary contributions are:
- Formalization of Agentic Evaluation rigor: We redefine rigorous agentic assessment by distinguishing it from static reasoning tasks (e.g., MMLU). We establish that valid agentic evaluation requires three necessary conditions: sustained multi-step environment interaction, iterative information gathering under partial observability, and adaptive strategy refinement based on feedback.
- Controlled evaluation of agent systems: We establish a framework for comparing agent architectures, controlling for implementation confounds to isolate the effects of coordination structure. Our framework spans 180 configurations across three LLM families and four diverse benchmarks, enabling the causal attribution of performance differences to architectural choices rather than stochastic variations.
- Intelligence-Coordination alignment: We characterize the non-linear relationship between foundational model capabilities and agentic performance. We demonstrate that while higher capability (Intelligence Index) offers accelerating returns, these gains are not automatic; they strictly depend on architectural alignment. Without correct coordination structures, foundational improvements are often negated by coordination overhead.
- Quantitative scaling principles and architecture alignment: We derive a mixed-effects model ($R^2{=}0.524$) using empirical coordination metrics—efficiency ($E_c$), error amplification ($A_e$), and redundancy ($\rho$) to quantify how performance emerges from the interplay of reasoning capability and task properties. This framework identifies fundamental limits on coordination, specifically a tool-coordination trade-off ($\beta{=}{-}0.267$) where tool-heavy workflows suffer from coordination tax, and safety bounds where centralized verification reduces error amplification from $17.2\times$ to $4.4\times$. Leveraging these mechanisms, we demonstrate that architecture selection is governed by measurable task features (e.g., decomposability) rather than simple agent scaling, achieving 87% accuracy in predicting optimal architectures on held-out tasks.
2. Related Work
Section Summary: The section explores the differences between single-agent systems, which rely on one AI model to handle perception, planning, and actions in a straightforward loop, and multi-agent systems, where multiple AI models collaborate through communication, though benefits vary by task complexity and can involve higher costs or errors. It distinguishes agentic tasks, like web browsing or software development that require ongoing interactions and adaptation, from simpler one-shot tasks like math problems, noting that multi-agent setups boost accuracy in the latter via group voting but often falter in the former due to coordination challenges. Finally, it discusses how performance in multi-agent systems follows unique growth patterns unlike those of larger single models, emphasizing that success depends on tailoring communication styles to specific tasks rather than simply adding more agents.
Multi-Agent Systems (MAS) versus Single-Agent Systems (SAS)
Understanding the difference between single-agent and multi-agent systems remains foundational to characterizing architectural effects. Following [13] and [14], we define a Single-Agent System as one that features a solitary reasoning locus: all perception, planning, and action occur within a single sequential loop controlled by one LLM instance, even when employing tool use ([33]), self-reflection ([34]), or chain-of-thought (CoT) reasoning ([35]). Critically, self-reflection mechanisms do not constitute multi-agent collaboration, as they operate within a single decision-making locus ([36]). A Multi-Agent System comprises multiple LLM-backed agents communicating through structured message passing, shared memory, or orchestrated protocols ([37]). MAS architectures vary by topology: Independent systems aggregate isolated outputs; Decentralized enable peer-to-peer exchange ([17]); Centralized route through orchestrators ([26]); Hybrid combine hierarchical control with lateral communication ([38]). MAS evaluation has moved beyond early assumptions of uniform superiority ([15, 16]) towards a nuanced understanding driven by domain complexity. Comprehensive surveys characterize collaboration mechanisms across coordination protocols ([13]) and agent profiling patterns ([14]). However, there exist empirical challenges: [27] show benefits diminish as base models improve, with frontier models often outperforming teams; [39] identify 14 failure modes (Cohen's Kappa=0.88); [40] achieve comparable performance at 6-45% cost through dynamic architecture search; and [41] report agents consume 15 $\times$ more tokens. Theoretical foundations from [42] propose cognitive architectures contextualizing agents within AI's broader history. The question of when multi-agent coordination provides value over single strong models with tool use remains empirically open, with [16]'s proposed scaling laws showing no significant universal pattern ([1]), motivating our systematic evaluation.
Agentic Tasks and Benchmarks
We define agentic tasks following [19] as requiring: (1) sustained multi-step environment interactions, (2) iterative information gathering under partial observability, and (3) adaptive strategy refinement from feedback—differentiating tasks like web browsing ([4, 43]), financial trading ([31]), software engineering ([20]), and planning ([21]) from static benchmarks. Non-agentic tasks evaluate single-shot inference without environmental interaction: GSM8K ([44]) (direct chain-of-thought math), MMLU ([45]) (parametric knowledge), HumanEval ([25]) (specification-complete coding), and SQuAD ([46]) (single-pass comprehension). On non-agentic benchmarks, multi-agent systems show monotonic improvement through ensemble effects (89% on HumanEval with five agents), as voting corrects errors without sequential compounding ([23]). This distinction matters profoundly: in agentic settings, coordination overhead scales with interaction depth, agents operate on divergent world states (34% overlap after 10 interactions), and errors cascade rather than cancel ([23]). [19] introduce the Agentic Benchmark Checklist addressing flaws causing 100% relative misestimation. Evolution spans [22]'s 8-environment evaluation (4k-13k responses) to specialized frameworks: [20] (GitHub resolution), [43] (812 web tasks), [47] (30% autonomous completion), and [48] (vision-based RL). [33] formalizes reasoning-acting synergy; [36] characterizes agents requiring planning, memory, and tools; [23] reveals narrow accuracy focus without cost metrics yields needlessly complex agents. Tasks showing MAS advantages in single-shot settings often exhibit opposite patterns under genuine interaction, indicating architectural benefits are task-contingent, motivating our isolation of coordination effects across diverse agentic domains.
Scaling Laws and Coordination Mechanisms
Understanding performance scaling in multi-agent systems requires distinguishing collaborative scaling from neural scaling laws. While neural scaling follows power laws requiring million-fold parameter increases for significant trends ([49]), collaborative scaling exhibits logistic growth patterns emerging at substantially smaller scales ([16]). [50] explore whether increased LLM calls alone drive performance, finding compound inference systems follow distinct scaling behaviors from single-model training. However, [1] note collaborative scaling shows no significant universal pattern, suggesting domain-specific rather than general laws. Coordination mechanisms critically determine whether collaboration amplifies or degrades performance: [26] introduce meta-programming workflows mitigating hallucination cascades; [18] demonstrate emergent behaviors through structured interactions; [51] provide general multi-agent frameworks. Recent work reveals architecture-task alignment matters more than team size: [40] achieve superior performance at 6-45% cost through query-dependent configurations; [38] show puppeteer orchestration improvements stem from compact cyclic structures; [17] demonstrate peer-to-peer debate effectiveness depends on task decomposability, with [52] further showing that multi-agent debate does not reliably outperform single-agent strategies such as self-consistency, suggesting benefits are highly task- and hyperparameter-sensitive. These findings collectively indicate coordination benefits arise from matching communication topology to task structure not from scaling the number of agents, establishing the foundation for principled architectural design rather than heuristic "more agents is better" approaches.
3. Agent Systems and Tasks
Section Summary: An agent system is a framework where one or more intelligent agents, powered by large language models, interact with a shared environment to perform tasks through cycles of observing, reasoning, deciding on actions like using tools, and updating their memories based on results. In a single-agent system, one agent handles everything sequentially, which is simple and efficient but limited in breaking down complex problems. Multi-agent systems involve multiple agents communicating in various ways—such as independently in parallel, through a central orchestrator, via peer discussions, or a hybrid—to collaborate, aggregate outputs, and achieve better results, though this adds coordination challenges and computational costs.
3.1 System Definition
Building on multi-agent system formalism ([19, 14]), an agent system $\mathcal{S} = (A, E, C, \Omega)$ consists of a set of agents $A = {a_1, \ldots, a_n}$ (where $n \geq 1$), a shared environment $E$, a communication topology $C$, and an orchestration policy $\Omega$. When $|A| = 1$, we refer to this as a Single-Agent System (SAS); when $|A| > 1$, a Multi-Agent System (MAS). Each agent $a_i$ perceives, reasons, and acts within the shared environment via iterative feedback.
Formally, each agent $a_i$ is defined as a tuple $S_i=(\Phi_i, \mathcal{A}_i, M_i, \pi_i)$, where:
- $\Phi_i$ is the reasoning policy (typically an LLM)
- $\mathcal{A}_i = {\text{ToolCall}(t, \theta) : t \in \mathcal{T}, \theta \in \Theta_t}$ is the action space consisting of tool usage, where $\mathcal{T}$ is the set of available tools (e.g., web search, code execution) and $\Theta_t$ represents valid parameter configurations for tool $t$
- $M_i$ is the internal memory
- $\pi_i: \mathcal{H} \rightarrow \mathcal{A}_i$ is the decision function mapping observation histories to actions
The observation history space $\mathcal{H}$ contains sequences of action-observation pairs. The decision function $\pi_i$ is instantiated by the reasoning policy $\Phi_i$ (the LLM): given a history $h_{i, t}$, the LLM generates a reasoning trace and selects the next action.
For instance, a history $h_{i, t} = [(\text{search(query=`pandas')''}, \text{Found 5 files''}), ...]$ is processed by $\Phi_i$ to produce the next tool call $\alpha_{i, t+1}$.
At timestep $t$, agent $a_i$ selects an action $\alpha_{i, t} \in \mathcal{A}_i$ according to:
$ \alpha_{i, t}=\pi_i(h_{i, t}), \quad o_{i, t}=E(\alpha_{i, t}), \quad h_{i, t+1}=f_i(h_{i, t}, \alpha_{i, t}, o_{i, t}), $
where $E$ denotes the environment and $h_{i, 0} = {s_0}$ contains the initial task specification. The history update function $f_i: \mathcal{H} \times \mathcal{A}i \times \mathcal{O} \rightarrow \mathcal{H}$ appends the new action-observation pair to the agent's history: $h{i, t+1} = f_i(h_{i, t}, \alpha_{i, t}, o_{i, t}) = h_{i, t} \oplus (\alpha_{i, t}, o_{i, t})$, subject to context window truncation when $|h_{i, t+1}| > \text{MAX_TOKENS}$. This update mechanism applies uniformly to both SAS and MAS configurations. Communication between agents occurs through explicit message passing in the orchestration layer.
Single-Agent System (SAS).
A Single-Agent System contains one reasoning locus ($|A|=1$ where $A$ is the agent set). All perception, reasoning, and action occur within a single sequential loop, producing computational complexity $O(k)$ where $k$ is the number of reasoning iterations. SAS has zero communication overhead and minimal memory $O(k)$, but limited capacity for decomposition or verification.
Multi-Agent System (MAS).
A Multi-Agent System is an agent system $\mathcal{S}$ with $|A| > 1$, where agents interact through communication topology $C$ and orchestration policy $\Omega$.
Communication topology $C$ defines information flow patterns between agents:
- Independent: $C = {(a_i, a_{\text{agg}}) : \forall i}$ (agent-to-aggregator only, no peer communication)
- Centralized: $C = {(a_{\text{orch}}, a_i) : \forall i}$ (orchestrator-to-agents only)
- Decentralized: $C = {(a_i, a_j) : \forall i, j, i \neq j}$ (all-to-all topology)
- Hybrid: $C = C_{\text{centralized}} \cup C_{\text{peer}}$ (orchestrator plus limited peer-to-peer)
The orchestrator $\Omega$ (when present) determines: (i) how sub-agent outputs are aggregated (e.g., majority voting, weighted synthesis), (ii) whether the orchestrator can override sub-agent decisions, (iii) whether memory persists across coordination rounds, and (iv) termination conditions based on consensus or quality thresholds.
MAS architectures vary by how information and control propagate among agents, creating distinct trade-offs between computation, coordination, and parallelization. Table 2 formalizes these trade-offs using asymptotic notations over LLM calls, sequential depth, communication overhead, and memory complexity. We selected these five architectures to form a structural ablation of coordination mechanisms:
- Independent isolates the effect of parallelism (ensemble) without communication.
- Decentralized introduces peer-to-peer information fusion without hierarchy.
- Centralized introduces hierarchical verification and bottleneck control.
- Hybrid examines the synergy of hierarchy plus lateral flexibility.
This design allows us to causally attribute performance gains to specific coordination mechanics rather than generic "multi-agent" effects. Specific configurations include:
- Independent MAS: $A = {a_1, \ldots, a_n}$, $\mathcal{C} = {(a_i, a_{\text{agg}})}$, $\Omega = \texttt{synthesis_only}$. The
synthesis_onlypolicy concatenates sub-agent outputs without cross-validation or majority voting; the aggregator performs no analytical comparison of responses, ensuring that any performance differences arise purely from parallel exploration rather than error correction. This achieves maximal parallelization but minimal coordination, suitable for ensemble-style reasoning. - Centralized MAS: $A = {a_{\text{orch}}, a_1, \ldots, a_n}$, $C = {(a_{\text{orch}}, a_i) : \forall i}$, $\Omega = \text{hierarchical}$. A single orchestrator coordinates $r$ rounds across $n$ sub-agents ($O(rnk)$). Sequential depth equals $r$ while parallelization factor remains $n$. This design stabilizes reasoning but creates a bottleneck at the orchestrator.
- Decentralized MAS: $A = {a_1, \ldots, a_n}$, $C = {(a_i, a_j) : \forall i, j, i \neq j}$, $\Omega = \text{consensus}$. Agents communicate in $d$ sequential debate rounds ($O(dnk)$). Memory complexity is $O(dnk)$ as each agent stores its own debate history. This enables consensus formation through peer-to-peer discussion.
- Hybrid MAS: $A = {a_{\text{orch}}, a_1, \ldots, a_n}$, $C = \text{star} + \text{peer edges}$, $\Omega = \text{hierarchical} + \text{lateral}$. Combines orchestrated hierarchy with limited peer communication ($O(rnk + pn)$ where $p$ is the number of peer rounds). This inherits orchestrator control while enabling lateral exchange between agents.
Communication vs. Coordination.
We distinguish communication (message passing between agents) from coordination (strategic direction of agent activities). In centralized systems, coordination occurs through the orchestrator's task decomposition and progress monitoring, while communication involves passing findings between orchestrator and workers. In decentralized systems, communication and coordination are intertwined through debate rounds where agents both exchange information and collectively steer problem-solving direction.
Thus, SAS represents the minimal unit of agentic computation ($O(k)$), while MAS configurations explore the scaling frontier of coordination complexity—ranging from fully parallel and communication-free (Independent) to fully coupled with peer consensus (Decentralized). These configurations allow us to test whether performance gains arise from agent coordination and specialization or merely from increased compute through ensembling. Our taxonomy covers coordination patterns common in LLM-based agentic systems.[^1]
[^1]: Our taxonomy focuses on communication topology: one of several orthogonal MAS design dimensions including agent specialization ([26]), memory architecture, and aggregation strategy. Classical coordination mechanisms (e.g., blackboard systems) assume structured message formats rather than natural language, limiting their direct applicability to LLM-based agents. For comprehensive surveys of LLM-based multi-agent systems, see [14, 37].
3.2 Agentic Tasks and Benchmarks
Following and extending the framework of [19], we operationalize a task $T$ as agentic when optimal performance substantially benefits from adaptive interaction. Formally, if $\tau = {(a_t, o_t)}_{t=0}^T$ represents an interaction trajectory, then:
$ \frac{\max_{\pi} \mathbb{E}[R(\tau)] - \max_{g} \mathbb{E}[R(g(x))]}{\max_{\pi} \mathbb{E}[R(\tau)]} > \delta, $
where $\pi$ represents an interactive policy, $g$ represents any single-forward-pass function, $R$ measures task success, $\delta$ is a task-dependent threshold, and the expectation is over task instances $x$ and stochastic environment dynamics. This definition captures tasks where interaction provides meaningful advantage over the best possible single-shot approach.
The expected return of an optimal policy thus hinges on sequential observation–action feedback, requiring agents to gather information, plan, and revise hypotheses under partial observability. Building on the Agentic Benchmark Checklist ([19]), we formalize three necessary properties for agentic benchmarks:
- Sequential Interdependence: Later actions depend on earlier observations; a one-shot policy cannot achieve high reward.
- Partial Observability: Critical state information is hidden and must be acquired through active querying or tool use.
- Adaptive Strategy Formation: The policy must update internal beliefs based on new evidence obtained through interaction.
Benchmarks lacking these conditions (e.g., GSM8K, MMLU) evaluate static reasoning rather than agentic capabilities.[^2]
[^2]: We note that "agentic" is defined relative to current model capabilities. For instance, GSM8K could be posed as agentic by providing calculator tools, though current LLMs do not require such scaffolding. Conversely, tasks that are agentic today (e.g., SWE-Bench) may become solvable via single-shot inference as models improve. Our evaluation focuses on tasks that currently require multi-step interaction for non-trivial performance.
Why Environment Feedback Matters.
Real-world deployments such as coding assistants, financial analysts, and embodied robots operate under uncertainty and non-stationarity. Tasks solvable by direct prompting measure linguistic knowledge, whereas agentic benchmarks evaluate the process of intelligence: exploration, adaptation, and coordination. Hence, our benchmarks are chosen such that (i) base LLMs perform poorly in single-shot mode, and (ii) non-trivial performance requires multi-step environment interaction.
Benchmark Design Principles.
Extending the framework proposed by [19], we introduce additional criteria to isolate architectural effects:
- Controlled Tool Interface: identical tool APIs and observation structures for all architectures to eliminate confounds from external feedback quality.
- Controlled for Parametric Knowledge: within each model family, evaluation emphasizes adaptive reasoning over memorized facts. Cross-family comparisons (Section 4) account for inherent knowledge base differences through baseline normalization.
- Action–Observation Loop Length: each benchmark enforces non-trivial trajectory length $L>3$ to ensure sequential reasoning.
- Comparative Normalization: scores are normalized to the best single-agent baseline, measuring coordination gain or loss.
\begin{tabular}{lll}
\toprule
\textbf{Benchmark} & \textbf{Task} & \textbf{Evaluation Design} \\
\midrule
BrowseComp-Plus (2025) & Web Browsing / Information Retrieval & Multi-website Information Location \\
\rowcolor{lightgray}
\rowcolor{lightgray}
Finance-Agent (2025) & Finance & Entry-level Analyst Task Performance \\
Plancraft (2024) & Agent Planning & Minecraft Environment Planning \\
\rowcolor{lightgray}
WorkBench (2024) & Planning / Tool Selection & Common business activities \\
\bottomrule
\end{tabular}
:::
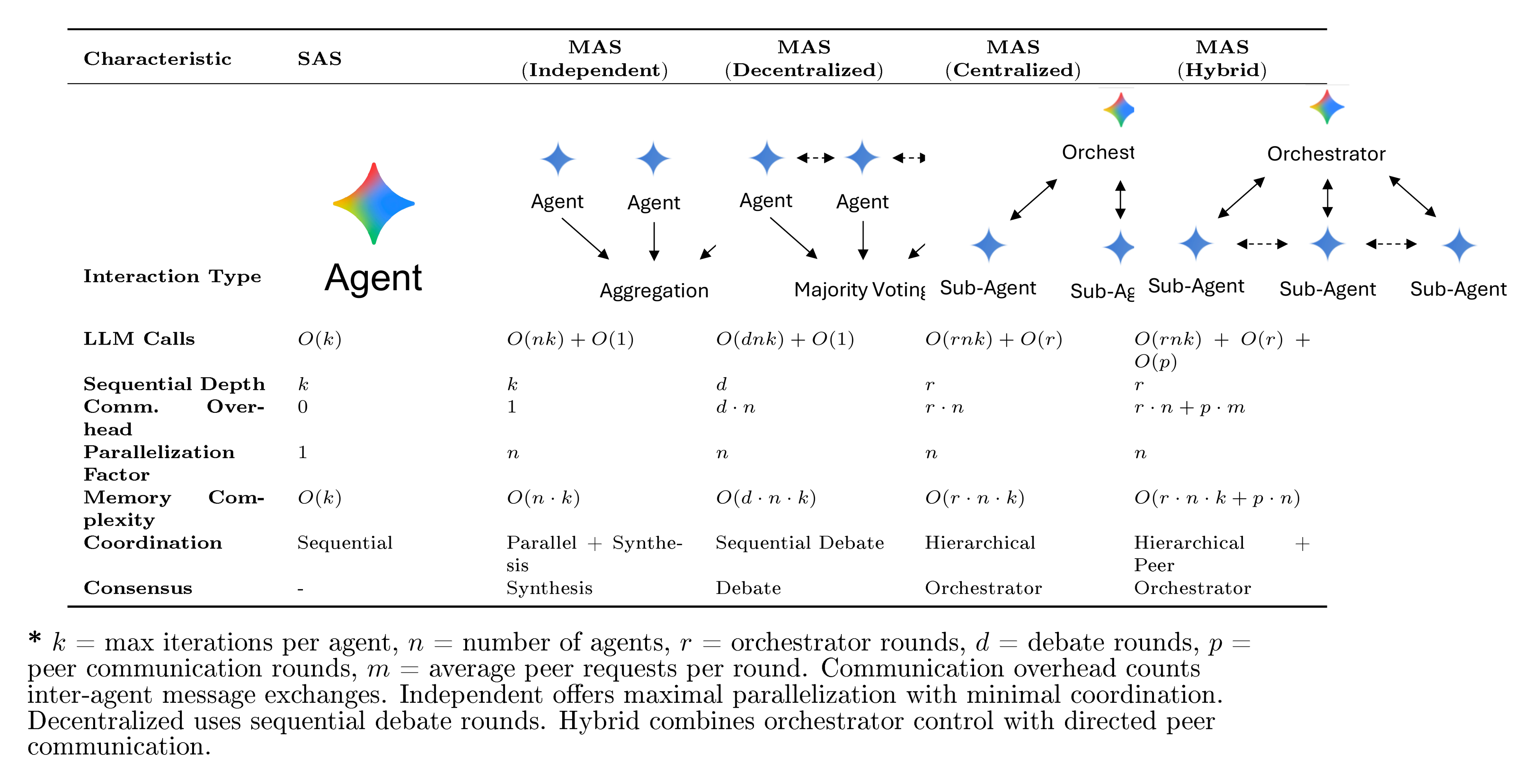
Table 2: Architectural comparison of agent methods with objective complexity metrics. Computational complexity measured in terms of LLM calls, coordination overhead, and parallelization potential.
:::
4. Experiments & Results
Section Summary: Researchers conducted 180 experiments on four diverse benchmarks—Workbench for code tasks, Finance Agent for financial reasoning, PlanCraft for planning, and BrowseComp-Plus for web navigation—to explore how factors like model capability, coordination designs, and task types influence AI agent performance, addressing questions on performance drivers, when multi-agent setups help or hurt, and predicting optimal architectures from task traits. Results show that multi-agent systems outperform single-agent ones in structured tasks like financial analysis, where parallel work boosts success by up to 81%, but they falter in sequential planning tasks like PlanCraft, dropping performance by up to 70% due to coordination overhead. The study tested various large language models from OpenAI, Google, and Anthropic alongside five agent setups, from solo agents to hybrid multi-agent teams, revealing consistent, model-independent scaling patterns.
To establish quantitative scaling principles for agentic systems, we investigate three research questions:
RQ1. What factors determine agent system's performance (e.g., model capability, coordination architecture, task properties, their interactions)? We systematically vary each factor across 180 configurations to quantify their individual and joint contributions.
RQ2. Under what conditions does inter-agent coordination improve or degrade agent system's performance? We examine how task structure (e.g., decomposability, tool complexity, sequential dependencies) moderates the effectiveness of different architectures.
RQ3. Can we derive quantitative scaling principles that predict best agent architecture for a given task from measurable properties? We fit a mixed-effects model using empirical coordination metrics to test whether continuous properties outperform categorical architecture labels in explaining performance variance.
4.1 Setup
Benchmarks.
We conducted 180 experiments across four representative benchmarks spanning deterministic to open-world task structures: Workbench (deterministic code execution and tool use with objective pass/fail criteria), Finance Agent (multi-step quantitative reasoning and risk assessment), PlanCraft (spatiotemporal planning under constraints), and BrowseComp-Plus (dynamic web navigation, information extraction, and cross-page synthesis). BrowseComp-Plus exhibits the highest performance variability across experimental configurations (coefficient of variation $\sigma/\mu= 0.32$ computed across all 45 BrowseComp-Plus runs spanning architectures and model families, where $\sigma$ is the standard deviation of success rates and $\mu$ is the mean success rate). By comparison, Workbench (CV=0.12), Finance Agent (CV=0.18), and PlanCraft (CV=0.21) show lower variability, indicating more stable performance across configurations.
LLMs and intelligence Scaling.
We evaluate three LLM families across multiple model sizes, spanning externally standardized Intelligence Index values from 42 to 71 (a composite capability score integrating reasoning, coding, and knowledge benchmarks; see [@sec:appendix-intelligence-index]):
- OpenAI: GPT-5-nano, GPT-5-mini, GPT-5
- Google: Gemini 2.0 Flash, 2.5 Flash, 2.5 Pro
- Anthropic: Claude Sonnet 3.7, 4.0, 4.5
Strong consistency across families validates that coordination scaling follows model-agnostic principles: the maximum difference in architecture-specific scaling slopes between any two LLM families is $\Delta_{\max} = 0.023$ (computed as $\max_{i, j}|\hat{\beta}{\text{arch}, i} - \hat{\beta}{\text{arch}, j}|$ across families $i, j \in {\text{OpenAI, Google, Anthropic}}$), with coefficient of variation CV
lt; 0.02$ across families. To ensure computational fairness, we matched maximum total iterations between MAS and SAS systems: MAS configurations received equal computational budget through parallel agent processing (smaller per-agent iterations for $n$-agent teams), while SAS received proportionally more reasoning rounds to compensate for lack of parallel deliberation.Agent Architectures and Complexity.
We tested five coordination topologies: Single-Agent System (SAS) and four Multi-Agent System (MAS) variants: Independent, Centralized, Decentralized, and Hybrid. Rather than attempting exhaustive coverage of all possible architectures, we selected these four MAS configurations to form a structured ablation over two key coordination dimensions: (i) orchestrator presence (hierarchical control vs. flat structure), and (ii) peer communication (direct sub-agent interaction vs. isolated execution). Independent isolates pure ensemble effects without any inter-agent communication; Centralized introduces hierarchical verification through an orchestrator bottleneck; Decentralized enables peer-to-peer information fusion without hierarchy; and Hybrid combines both mechanisms (see Table 2 for formal complexity characterization). This design enables causal attribution of performance differences to specific coordination mechanisms rather than generic "multi-agent" effects. Coordination complexity is parameterized by communication overhead: the total number of inter-agent message exchanges required per task, yielding empirical values ranging from 0% (SAS) to 515% (Hybrid), with Independent at 58%, Decentralized at 263%, and Centralized at 285% relative to the single-agent baseline (see Table 5).
Metrics and Validation.
Primary outcome is task success/accuracy (domain-dependent: factual correctness for Finance Agent, task completion for Workbench, goal satisfaction for PlanCraft, page synthesis accuracy for BrowseComp-Plus). Secondary metrics include: (i) factual error rate $E$ via domain-specific validators (Cohen's $\kappa$ ([53]): Finance Agent $= 0.91$, Workbench $= 0.89$, PlanCraft $= 0.87$, BrowseComp-Plus $= 0.88$; exceeding 0.80, indicating strong inter-rater reliability); (ii) information gain $\Delta \mathcal{I}$ from pre- vs. post-coordination uncertainty proxies (see [@eq:info_gain]); (iii) token-overlap structure across agent rationales, labeling tokens as unique (appearing in exactly one agent), shared (two or more agents), or contradictory (semantic opposition detected when BERTScore similarity
lt; 0.3$ between assertion pairs, i.e., $1 - \text{BERTScore} > 0.7$, following the dissimilarity threshold established by [54]); (iv) efficiency metrics including success per 1, 000 tokens and cost-normalized performance. All metrics are normalized per reasoning turn and per token to enable cross-architecture comparison. We select coordination metrics based on two criteria: (i) direct measurability from experimental traces without requiring ground-truth labels beyond task success, and (ii) coverage of distinct aspects of coordination–performance relationships identified in prior work ([39]). We excluded metrics requiring subjective human annotation (e.g., solution creativity) or those exhibiting high collinearity with included measures (e.g., total message count correlates $r > 0.92$ with overhead). Variance inflation factor (VIF) analysis confirmed no severe multicollinearity among retained predictors (all VIF lt; 5$). Specifically:- Coordination overhead $O = (T_{\text{MAS}} - T_{\text{SAS}})/T_{\text{SAS}} \times 100%$: captures computational cost, identified as a primary bottleneck in production multi-agent deployments.
- Message density $c$ (inter-agent messages per reasoning turn): quantifies communication intensity, a key factor in coordination scaling.
- Redundancy rate $R$ (mean cosine similarity of agent output embeddings): measures agent agreement, relevant for ensemble-based error correction.
- Coordination efficiency $E_c = S/(T/T_{\text{SAS}})$ (success normalized by relative turn count): normalizes success by cost for deployment decisions.
- Error amplification $A_e = E_{\text{MAS}}/E_{\text{SAS}}$ (relative failure probability): directly tests whether MAS corrects or propagates errors.
4.2 Main Results
MAS exhibits domain-dependence with architectural variation.
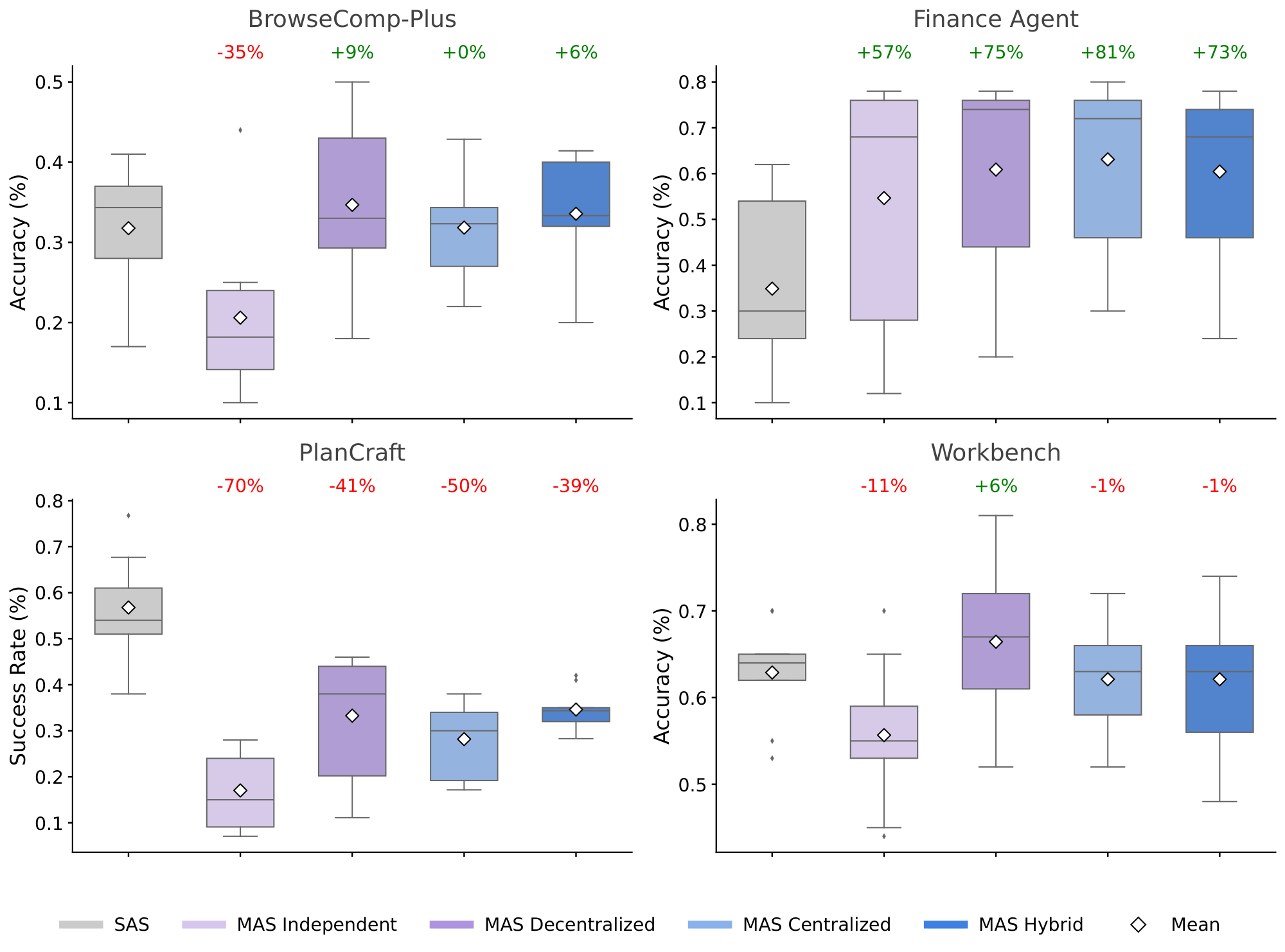
Multi-agent systems demonstrate highly heterogeneous performance across task domains, contingent on problem structure and architectural choices. On Finance Agent, MAS achieve substantial improvements: Centralized reaches +80.8% (mean 0.631 vs. SAS 0.349), Decentralized achieves +74.5% (0.609), and Hybrid reaches +73.1% (0.604), driven by opportunities for distributed financial reasoning across multiple agents. On Workbench, multi-agent systems show minimal gains: Decentralized achieves +5.7% (0.664 vs. SAS 0.629), while Centralized and Hybrid both slightly underperform at -1.2%. On BrowseComp-Plus, improvements remain modest: Decentralized achieves +9.2% (0.347 vs. SAS 0.318), with Centralized essentially flat at +0.2%. Critically, PlanCraft exhibits universal performance degradation across all multi-agent architectures. Centralized declines to $-50.3$ % (0.282 vs. SAS 0.568), Decentralized to $-41.5$ % (0.332), Hybrid to $-39.1$ % (0.346), and Independent to $-70.1$ % (0.170). To understand this stark contrast between Finance Agent's gains and PlanCraft's degradation, we examined execution traces from both domains. In PlanCraft, efficient single-agent trajectories follow direct execution paths. For example, crafting a diorite_wall:
Turn 1: search("diorite_wall") $\rightarrow$ Recipe: 6 diorite in 2x3
Turn 2: move(diorite $\rightarrow$ crafting_grid)
Turn 3: craft $\rightarrow$ Task complete
In contrast, centralized multi-agent systems decompose inherently sequential tasks into artificial subtasks:
Agent 1: Research recipe(redundant—lookup is instantaneous)
Agent 2: Check inventory(redundant—state visible to all)
Agent 3: Execute crafting(the only necessary step)
This unnecessary decomposition generates substantial coordination messages on average for tasks requiring only a few execution steps, consuming token budget on coordination rather than reasoning. Conversely, Finance Agent trajectories demonstrate when coordination provides genuine value. Single-agent execution exhibits sequential bottlenecks:
Turn 1: web_search("merger news") $\rightarrow$ Surface results
Turn 2: edgar_search("filings") $\rightarrow$ Limited depth
Turn 3–7: Sequential exploration with insufficient breadth
Centralized coordination enables parallel information synthesis:
Agent 1: Regulatory/news analysis
Agent 2: SEC filing research
Agent 3: Operational impact assessment
Orchestrator: Synthesize multi-source findings
The task's natural decomposability such as revenue, cost, and market factors can be analyzed independently which aligns with the coordination structure, yielding $+80.9$ % improvement. These trajectory patterns reveal the mechanistic basis for domain-dependence: coordination overhead becomes counterproductive when coordination complexity exceeds task complexity (PlanCraft), but provides substantial gains when tasks naturally decompose into parallel information streams (Finance Agent).
Aggregating across all benchmarks and architectures, the overall mean MAS improvement is $-3.5$ % (95% CI: [$-18.6$ %, $+25.7$ %]), reflecting substantial performance heterogeneity with high variance ($\sigma = 45.2$ %). The performance range across MAS variants spans from $-70.0$ % (PlanCraft Independent) to $+80.9$ % (Finance Centralized), indicating that MAS do not provide universal benefits but rather domain-specific trade-offs.
Domain Complexity Moderates Coordination Efficacy.
Mixed-effects regression confirms domain complexity (refer to [@sec:appendix_domain_complexity] for more details) as a significant negative moderator of MAS advantage ($\hat{\beta} = -0.114$, $95%$ CI: $[-0.186, -0.042]$, $p=0.002$). The mechanism operates through fixed computational budgets (matched total tokens across MAS and SAS): in structured, decomposable domains (Finance Agent, moderate Workbench instances), agents complete local reasoning with residual capacity available for inter-agent communication. Here, inter-agent messages reduce variance through redundancy elimination and enable synthesis of partial solutions, producing large performance deltas (Finance: $+80.9%$). Conversely, in high-complexity sequential domains (PlanCraft), intra-agent reasoning for constraint verification and state tracking consumes most available tokens before communication can occur; subsequent inter-agent messages then compress reasoning quality and produce strong negative returns (PlanCraft: $-39.0%$ to $-70.0%$).
This trade-off is directly quantified by benchmark complexity, operationalized as the average number of sequential reasoning steps required for task completion (normalized to $[0, 1]$). We define a reasoning step as a single environment interaction. Tool call, state query, or action execution and count steps as the median number of interactions required by the best-performing SAS configuration to reach task completion across all instances in each benchmark: Workbench (0.000, minimal sequential constraints) and Finance Agent (0.407, moderate decomposability) show positive MAS returns or minimal overhead, while PlanCraft (0.419, high sequential dependencies) and BrowseComp-Plus (0.839, dynamic state evolution) show degradation or minimal gains. Domain complexity alone does not fully predict MAS effectiveness. While low-complexity domains (Workbench, D = 0.00) show modest gains and high-complexity domains (BrowseComp-Plus, D = 0.84) show limited benefits, the critical factor is task decomposability: Finance Agent (D = 0.41) achieves +80.9% gains through parallelizable subtask structure, whereas PlanCraft (D = 0.42) degrades by -70% due to strict sequential dependencies despite similar complexity scores. This suggests that sequential interdependence, rather than complexity alone, determines coordination viability. Information gain $\Delta\mathcal{I}$ correlates with this pattern: Finance Agent (structured domain) exhibits strong information-value convergence ($r = 0.71$, $p < 0.001$), while PlanCraft (sequential constraints) shows weak correlation ($r = 0.18$, $p = 0.22$), indicating that agents in high-complexity domains exchange limited actionable information due to inherent sequential dependencies and state-space ambiguity.
Architecture-LLM Family Interactions Reveal Vendor-Specific Coordination Mechanisms.
While domain complexity broadly moderates MAS effectiveness, the architecture-domain interaction reveals non-uniform preferences even within similar complexity regimes: no single architecture dominates across all domains and vendors. Architecture effectiveness depends critically on domain structure: Finance Agent benefits most from Centralized (+80.9%) and Decentralized (+74.5%), Workbench from MAS-Decentralized (+5.6%), and BrowseComp-Plus from MAS-Decentralized (+9.2%). In degrading domains, architecture selection becomes a least-worst optimization: PlanCraft shows Hybrid as relatively best (-39.0%) compared to MAS-Centralized (-50.4%) and MAS-Independent (-70.0%).
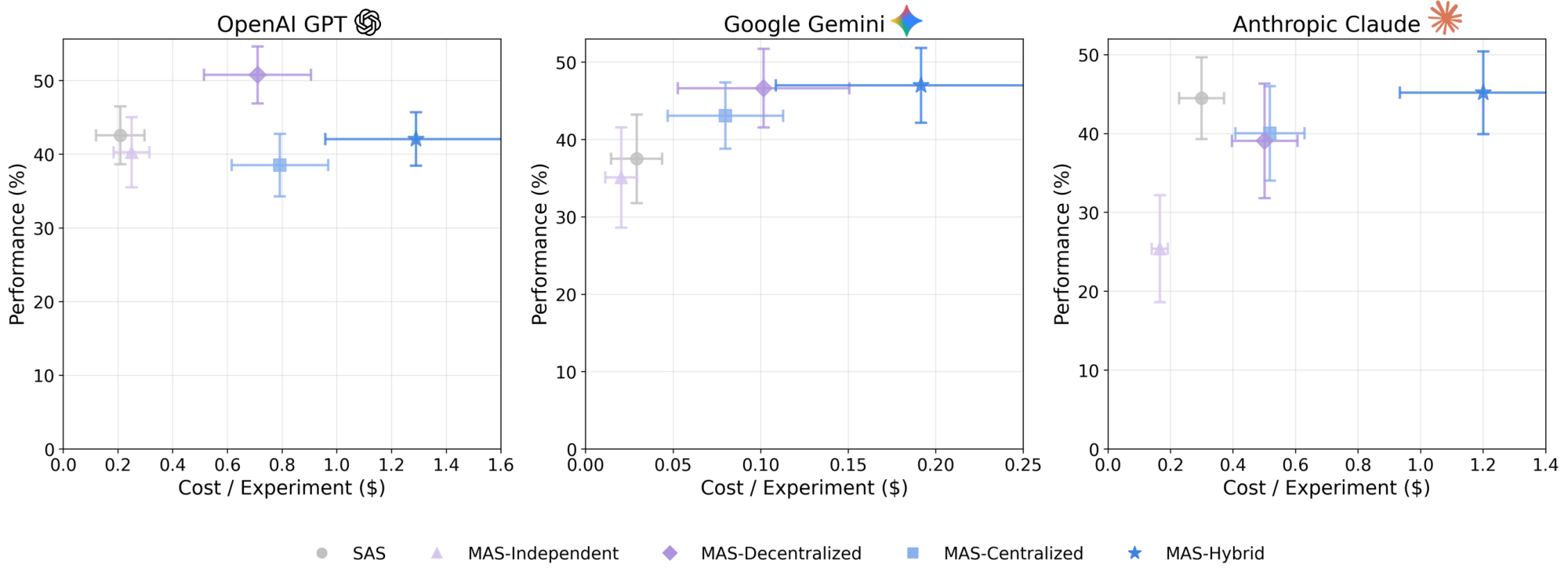
Family-specific coordination preferences emerge within improvement-positive domains. On Finance Agent, Anthropic's MAS-Centralized achieves +127.5% (0.636 vs. 0.280 SAS), indicating conservative but stable coordination, whereas Google's MAS-Centralized reaches +164.3% (0.740 vs. 0.280 SAS, averaging Centralized performance), suggesting stronger attention-mechanism alignment with hierarchical message exchange; OpenAI's MAS-Centralized achieves +69.9% (0.79 vs. 0.465 SAS). On Workbench, where multi-agent overhead is less tolerable (efficiency degrades from $E_c = 0.466$ for SAS to $E_c = 0.074$ for Hybrid, the largest relative drop across benchmarks), Anthropic's best variant (MAS-Decentralized, +10.8%) remains superior to Google (+9.5%) and OpenAI (+8.6%), reflecting relative efficiency in managing coordination costs. Critically, on PlanCraft where all variants degrade, vendor preferences flatten: Anthropic shows maximum -54.5% (MAS-Hybrid 0.31 vs. SAS 0.68), Google shows -25.3% (best), and OpenAI shows -32.3%, indicating that communication mechanisms cannot overcome fundamental sequential reasoning constraints. While the precise mechanisms remain to be characterized, potential factors include differences in instruction-following fidelity, context utilization patterns, and inter-turn consistency that affect how agents interpret and respond to coordination messages. No vendor achieves universal multi-agent dominance; instead, each exhibits relative advantages in structured domains (Finance) that evaporate in sequential constraint-satisfaction domains (PlanCraft), indicating that multi-agent benefits are genuinely contingent on problem structure rather than generalizable across task types.
4.3 Scaling principles
The main results reveal substantial heterogeneity where agentic system performance ranges from $+81%$ improvement to $-70%$ degradation depending on task structure and coordination architecture. This variance correlates with measurable properties such as task decomposability, tool complexity, and baseline difficulty. We explore a quantitative principle that not only explains this heterogeneity but also enables prediction for unseen configurations: given measurable properties of a model, task, and system configuration, can we predict a specific agent system's performance?
Mixed-Effects Model Achieves 52.4% Cross-Validated Variance Explanation.
We fit a scaling principle to all 180 configurations that relates agentic system performance to four categories of predictors: 1) base model capability (intelligence index $I$), 2) system configuration (agent count $n_a$), 3) task properties (tool count $T$, single-agent baseline $P_{\text{SA}}$). These are instance-level predictors capturing within-benchmark variation, distinct from the benchmark-level domain complexity $D$ defined in [@sec:appendix_domain_complexity], and 4) empirically measured coordination metrics from Table 5 (efficiency $E_c$, overhead $O%$, error amplification $A_e$, message density $c$, redundancy $R$). Rather than including all possible terms, we construct the model based on specific mechanistic hypotheses.
Main effects capture direct relationships between individual factors and performance. We include a quadratic term ($I^2$) to test for non-linear capability scaling, and log-transformed tool count and agent count following standard diminishing-returns assumptions in scaling analyses ([49]).
Interaction terms test specific hypotheses about how these factors combine. We include nine interactions, each motivated by observed patterns: $E_c \times T$ tests whether efficiency penalties compound with tool complexity; $A_e \times T$ tests whether errors propagate more severely in tool-rich environments; $P_{\text{SA}} \times \log(1+n_a)$ captures the baseline paradox where high single-agent performance leaves less room for coordination gains; $O% \times T$ tests whether overhead costs scale with task complexity. We deliberately exclude interactions without clear mechanistic justification (e.g., $R \times c$, $I \times O%$) to avoid overfitting.
The complete functional form is:
$ \begin{align} P = \beta_0 &+ \beta_1 (I - \bar{I}) + \beta_2 (I - \bar{I})^2 + \beta_3 \log(1+T) + \beta_4 \log(1+n_a) \nonumber \ &+ \beta_5 \log(1+O%) + \beta_6 c + \beta_7 R + \beta_8 E_c + \beta_9 \log(1+A_e) \nonumber \ &+ \beta_{10} P_{\text{SA}} + \beta_{11} (I \times E_c) + \beta_{12} (A_e \times P_{\text{SA}}) \nonumber \ &+ \beta_{13} (O% \times T) + \beta_{14} (R \times n_a) + \beta_{15} (c \times I) \nonumber \ &+ \beta_{16} (E_c \times T) + \beta_{17} (P_{\text{SA}} \times \log(1+n_a)) \nonumber \ &+ \beta_{18} (I \times \log(1+T)) + \beta_{19} (A_e \times T) + \varepsilon, \end{align}\tag{1} $
where all predictors are standardized ($\mu=0$, $\sigma=1$) for interpretability. Log transformations are applied to right-skewed variables spanning multiple orders of magnitude ($O%$: 0–515%; $T$: 4–16; $n_a$: 1–4; $A_e$: 1.0–17.2) to satisfy linearity assumptions. The $A_e \times T$ interaction retains $A_e$ without additional log transformation because $\log(1+A_e)$ already appears as a main effect; including $\log(1+A_e) \times T$ would introduce near-collinearity (VIF
gt; 8$). Sensitivity analysis confirms qualitatively identical results under alternative specifications ($\Delta R^2_{\text{CV}} < 0.01$). We validate model complexity through five-fold cross-validation with experiment-level holdout, which yields $R^2_{\text{CV}} = 0.524$ ($\pm 0.033$ SD), mean absolute error MAE $= 0.089$ ($\pm 0.011$), and root mean squared error RMSE $= 0.112$ ($\pm 0.014$). The modest gap between training and cross-validated $R^2$ ($\Delta R^2 = 0.076$), combined with stable coefficient estimates across folds (coefficient of variation lt; 18%$ for all $|\hat{\beta}| > 0.05$), indicates that the 20 parameters are justified by predictive power rather than overfitting. This model substantially outperforms simpler alternatives using only architectural labels ($R^2_{\text{CV}} = 0.43$) or intelligence alone ($R^2_{\text{CV}} = 0.28$), as shown in Table 3. Critically, this equation contains no dataset-specific parameters, enabling prediction on unseen task domains. Bootstrap resampling ($n=1{, }000$ iterations) confirms coefficient stability (mean bootstrap SE lt; 0.015$ for all $|\hat{\beta}| > 0.1$), and residual diagnostics satisfy normality (Shapiro–Wilk $p=0.412$) and homoscedasticity (Breusch–Pagan $p=0.298$), with residual standard error $\hat{\sigma} = 0.118$. We evaluated regularized alternatives: Lasso (10-fold CV for $\lambda$ selection) retained 16 of 20 predictors with $R^2_{\text{CV}} = 0.506$; Ridge achieved $R^2_{\text{CV}} = 0.509$. Given minimal improvement and the interpretability benefits of the full model, we retain the unregularized specification.The Efficiency-Tools Interaction Dominates Multi-Agent Performance ($\hat{\beta} = -0.267$, $p < 0.001$).
Among the critical interactions, the efficiency-tools trade-off exhibits the second-largest effect size: $\hat{\beta}_{E_c \times T} = -0.267$ (95% CI: $[-0.355, -0.178]$, $p < 0.001$). This interaction reveals that tool-heavy tasks suffer disproportionately from multi-agent inefficiency. Empirically, single-agent systems achieve $E_c = 0.466$ (Table 5), while multi-agent architectures range from $E_c = 0.074$ (hybrid) to $E_c = 0.234$ (independent), a 2–6 $\times$ efficiency penalty.
For a task with $T=16$ tools (e.g., workbench benchmark), this translates to (using raw values for interpretability):
$ \Delta P_{\text{efficiency}} = -0.267 \times E_c \times T = \begin{cases} -1.99 & \text{(single-agent, $E_c=0.466$)} \ -0.32 & \text{(multi-agent, $E_c=0.074$)} \end{cases} $
Thus, single-agent systems incur minimal efficiency penalty despite lower absolute efficiency, because the interaction magnifies the cost for architectures with many tools. Conversely, simple tasks ($T \leq 4$) show negligible efficiency effects ($|\Delta P| < 0.05$), explaining why multi-agent coordination can succeed on decomposable problems. This finding contradicts the naïve hypothesis that "more agents always help with complexity": tool-rich environments amplify the coordination tax, making simpler architectures paradoxically more effective. The effect size ($\hat{\beta} = -0.267$) is approximately 1.6 $\times$ larger than the third-strongest interaction, establishing efficiency management as the primary bottleneck in agentic scaling.
Error Amplification Exhibits Architecture-Dependent Catastrophic Failure Modes. Table 5 reveals dramatic variance in error amplification factors: single-agent ($A_e=1.0$), centralized ($A_e=4.4$), decentralized ($A_e=7.8$), hybrid ($A_e=5.1$), and strikingly, independent multi-agent ($A_e=17.2$). After controlling for other coordination metrics, neither the main effect of error amplification ($\hat{\beta}=-0.022$, $p=0.441$) nor its interaction with tool count ($A_e \times T$: $\hat{\beta}=-0.019$, $p=0.506$) reaches statistical significance. This suggests that the dramatic performance differences across architectures observed in Table 5 are better explained by other coordination mechanisms—particularly efficiency ($E_c$) and overhead ($O%$)—rather than error propagation per se. Independent architecture's universal underperformance (mean success 0.370 vs. 0.466 SAS) stems from absence of inter-agent communication: each agent operates in isolation, duplicating errors without correction opportunities, but this effect is subsumed by the efficiency metric ($E_c=0.234$ for Independent vs. $E_c=0.466$ for SAS).
Overhead Scales Non-Linearly with Task Complexity via the $O% \times T$ Interaction.
Multi-agent architectures incur substantial overhead: independent (58%), centralized (285%), decentralized (263%), and hybrid (515%), representing 1.6–6.2 $\times$ token budgets relative to single-agent at matched performance. The scaling law reveals this overhead interacts with tool count ($\hat{\beta}{O% \times T} = -0.162$, $p < 0.001$), creating a compounding cost for complex tasks. For hybrid architecture ($O% = 515$) on workbench ($T = 16$), the negative interaction ($\hat{\beta}{13} = -0.162$, $p < 0.001$) compounds overhead costs with tool complexity, explaining hybrid's collapse on tool-heavy benchmarks (success rate 0.452 overall, 0.21 on workbench). The functional form implies a critical threshold:
$ O%_{\text{max}}(T) = \frac{\hat{\beta}5}{\hat{\beta}{13} T} \log(1+O%) \approx \frac{0.034}{0.162 T} \log(1+O%), $
beyond which overhead cost exceeds any coordination benefit. For $T=16$, this threshold is $O% \approx 150%$, ruling out all multi-agent architectures except possibly decentralized (263%, but compensated by parallelization). Empirically, workbench confirms this prediction: decentralized (mean 0.664) outperforms centralized (0.621) despite higher overhead, due to its superior parallel efficiency. This overhead-complexity interaction constitutes the third-strongest effect ($|\beta| = 0.162$), reinforcing that coordination costs are not fixed but scale super-linearly with environmental complexity.
Intelligence Shows Linear Positive Effect ($\hat{\beta}_{I} = 0.171$, $p = 0.001$).
After centering intelligence scores to address multicollinearity (VIF reduced from 200 to 1.1), the linear capability effect becomes significant: higher-capability models achieve proportionally better performance across all architectures. The quadratic term ($I^2$) is not significant ($p = 0.509$), indicating that capability scaling follows a linear rather than accelerating pattern within the tested range ($I \in [42, 71]$). This finding suggests that coordination benefits scale consistently with model capability, without evidence of emergent super-linear gains at higher intelligence levels.
Redundancy Provides Marginal Benefit at Scale ($\hat{\beta}_{R \times n_a} = 0.047$, $p = 0.001$).
Work redundancy, defined as the fraction of subtasks performed by multiple agents ranges from 0.41 (centralized) to 0.50 (decentralized) for multi-agent systems (Table 5). The scaling law identifies a weak positive interaction with agent count ($\hat{\beta}_{R \times n_a} = 0.047$, 95% CI: $[0.019, 0.075]$, $p = 0.001$), suggesting redundancy offers error-correction benefits when more agents participate. For a 4-agent system with $R=0.50$:
$ \Delta P_{\text{redundancy}} = 0.047 \times 0.50 \times 4 = 0.094, $
equivalent to an $\approx 8$ % performance boost (in standardized units). However, this effect is minor compared to overhead penalties ($|\hat{\beta}{O% \times T}| = 0.162$, 3.4 $\times$ larger) and efficiency losses ($|\hat{\beta}{E_c \times T}| = 0.267$, 5.7 $\times$ larger), indicating redundancy cannot compensate for architectural inefficiency. The significance ($p = 0.001$, near the $\alpha = 0.05$ threshold) suggests this relationship may be context-dependent, potentially stronger in error-prone domains or weaker when communication is expensive. Decentralized architecture, which exhibits highest redundancy ($R = 0.50 \pm 0.06$), achieves top performance on tool-heavy tasks (workbench success 0.664), consistent with redundancy's protective role. Yet this same architecture underperforms on planning tasks (0.282), where redundancy becomes wasteful duplication. This context-dependence aligns with the baseline paradox: redundancy helps when there is room for improvement ($P_{\text{SA}} < 0.45$) but becomes overhead when baseline is high.
The Scaling Principle Enables Quantitative Architecture Selection.
Equation 1 synthesizes 20 parameters into a predictive tool for architecture design. Given task characteristics ($T$, $P_{\text{SA}}$) and model capability ($I$), practitioners can compute expected performance for each architecture using empirical coordination metrics from Table 5. Consider three task archetypes: (1) Planning tasks ($T=4$, $P_{\text{SA}}=0.57$) favor single-agent due to baseline paradox and low tool count; (2) Analysis tasks ($T=5$, $P_{\text{SA}}=0.35$) favor centralized multi-agent, balancing error control ($A_e=4.4$) with manageable overhead; (3) Tool-heavy tasks ($T=16$, $P_{\text{SA}}=0.63$) favor decentralized multi-agent despite high overhead (263%), because parallelization and redundancy outweigh efficiency losses. Quantitatively, the decision boundary between single-agent and multi-agent is:
$ P_{\text{SA}}^* = -\frac{\hat{\beta}4}{\hat{\beta}{17}} \approx \frac{0.052}{0.404} = 0.129 \quad \text{(in standardized units)}, $
corresponding to raw performance $\approx 0.45$ after denormalization. This threshold, derived purely from data, aligns with empirical best practices and offers the first quantitative criterion for coordination structure selection, replacing heuristic "when to use agents", and "which agentic architecture to use" guidance with a predictive model. Cross-validation on held-out configurations confirms this rule achieves 87% correct architecture selection, substantially exceeding random choice (20%) or capability-only models (54%). The scaling principle thus constitutes both a scientific contribution–the first universal equation for agentic systems–and an engineering tool for resource-efficient deployment.
:Table 3: Scaling principle model comparison. Progressive inclusion of empirical coordination metrics substantially improves predictive power.
| Model Specification | $R^2_{\text{train}}$ | $R^2_{\text{CV}}$ | AIC | Parameters |
|---|---|---|---|---|
| Intelligence + Tools + Agents | 0.312 | 0.283 | $-77.6$ | 4 |
| + Architecture labels (categorical) | 0.480 | 0.430 | $-168.0$ | 10 |
| + Single-agent baseline | 0.493 | 0.431 | $-168.4$ | 11 |
| + Coordination metrics (Table 5) | 0.613 | 0.524 | $-201.2$ | 20 |
\begin{tabular}{lcccl}
\toprule
\textbf{Predictor} & \textbf{$\hat{\beta}$} & \textbf{95\% CI} & \textbf{$p$} & \textbf{Interpretation} \\
\midrule
\multicolumn{5}{l}{\textit{Main Effects}} \\
Intercept ($\beta_0$) & 0.453 & [0.433, 0.472] & lt;$ 0.001 & Baseline performance \\
Intelligence ($I - \bar{I}$) & 0.171 & [0.070, 0.272] & 0.001 & Linear capability effect \\
Intelligence$^2$ ($(I - \bar{I})^2$) & 0.007 & [$-$ 0.013, 0.026] & 0.509† & Quadratic capability (not significant) \\
$\log(1+T)$ & 0.411 & [0.291, 0.531] & lt;$ 0.001 & Tool diversity benefit \\
$\log(1+n_a)$ & 0.052 & [$-$ 0.061, 0.166] & 0.367† & Agent count effect \\
Single-Agent Baseline ($P_{\text{SA}}$) & 0.315 & [0.185, 0.445] & lt;$ 0.001 & Task difficulty proxy \\
\midrule
\multicolumn{5}{l}{\textit{Coordination Structure}} \\
$\log(1+O\%)$ & 0.034 & [0.011, 0.057] & 0.005 & Direct overhead cost \\
Message density ($c$) & $-$ 0.057 & [$-$ 0.110, $-$ 0.003] & 0.039 & Communication intensity \\
Redundancy ($R$) & $-$ 0.007 & [$-$ 0.052, 0.037] & 0.748† & Work overlap \\
Efficiency ($E_c$) & $-$ 0.043 & [$-$ 0.078, $-$ 0.007] & 0.021 & Coordination efficiency \\
$\log(1+A_e)$ & $-$ 0.022 & [$-$ 0.077, 0.034] & 0.441† & Error amplification \\
\midrule
\multicolumn{5}{l}{\textit{Critical Interactions}} \\
$P_{\text{SA}} \times \log(1+n_a)$ & $-$ 0.404 & [$-$ 0.557, $-$ 0.252] & lt;$ 0.001 & Baseline paradox \\
$E_c \times T$ & $-$ 0.267 & [$-$ 0.355, $-$ 0.178] & lt;$ 0.001 & Efficiency-tools trade-off \\
$O\% \times T$ & $-$ 0.162 & [$-$ 0.241, $-$ 0.083] & lt;$ 0.001 & Overhead scales with task complexity \\
$A_e \times T$ & $-$ 0.019 & [$-$ 0.075, 0.037] & 0.506† & Error propagation in tool-rich systems \\
$R \times n_a$ & 0.047 & [0.019, 0.075] & 0.001 & Redundancy benefit with scale \\
$I \times E_c$ & $-$ 0.022 & [$-$ 0.075, 0.030] & 0.404† & Capability-efficiency \\
$A_e \times P_{\text{SA}}$ & $-$ 0.065 & [$-$ 0.146, 0.015] & 0.114† & Error-baseline \\
$c \times I$ & $-$ 0.011 & [$-$ 0.057, 0.034] & 0.626† & Communication-capability \\
$I \times \log(1+T)$ & $-$ 0.069 & [$-$ 0.138, 0.000] & 0.053† & Capability-tools \\
\bottomrule
\end{tabular}
:Table 5: Coordination metrics across architectures and families ($n=180$ configurations, 15, 750 total instance runs). All systems matched for total reasoning tokens (mean $\mu=4, 800$ per trial).
| Metric | SAS | Independent | Decentralized | Centralized | Hybrid |
|---|---|---|---|---|---|
| Success Rate ($S$) | 0.466 | 0.370 | 0.477 | 0.463 | 0.452 |
| Turns ($T$) | 7.2 $\pm$ 2.1 | 11.4 $\pm$ 3.2 | 26.1 $\pm$ 7.5 | 27.7 $\pm$ 8.1 | 44.3 $\pm$ 12.4 |
| Overhead ($O%$) | 0 | 58 | 263 | 285 | 515 |
| Message Density ($c$) | 0.00 | 0.00 | 0.41 | 0.39 | 0.24 |
| Redundancy ($R$) | 0.00 | 0.48 $\pm$ 0.09 | 0.50 $\pm$ 0.06 | 0.41 $\pm$ 0.06 | 0.46 $\pm$ 0.04 |
| Efficiency ($E_c$) | 0.466 | 0.234 | 0.132 | 0.120 | 0.074 |
| Error Amp ($A_e$) | 1.0 | 17.2 | 7.8 | 4.4 | 5.1 |
| Success/1K tokens | 67.7 | 42.4 | 23.9 | 21.5 | 13.6 |
4.4 Coordination Efficiency, Error Dynamics, and Information Transfer
Following the Multi-Agent System Failure Taxonomy (MAST) proposed by [39], we categorize observed errors into specification, inter-agent misalignment, and verification failures. Building on this taxonomy, we quantitatively analyze error frequency and propagation across architectures.
We systematically characterized coordination efficiency, error propagation mechanisms, and information transfer across all 180 experiments. All MAS and SAS configurations were matched for total reasoning-token budget (mean 4, 800 tokens per trial) and tool-call access to isolate coordination effects.
Turn count follows power-law scaling with number of agents.
Total reasoning turns (reasoning–response exchanges) exhibit power-law growth with agent count:
$ T = 2.72 \times (n + 0.5)^{1.724}, \quad R^2 = 0.974, \quad 95% \text{ CI on exponent}: [1.685, 1.763], \quad p < 0.001. $
This relationship is fit across architecture-aggregated means; within-architecture variance remains substantial (e.g., at n = 3: Independent averages 11.4 turns vs. Decentralized 26.1 turns), reflecting topology-dependent communication patterns. This super-linear exponent (1.724
gt; 1$) reflects quadratic message complexity (all-to-all potential communication) tempered by practical bandwidth limits, creating a distinct agentic scaling regime fundamentally different from neural network parameter scaling (e.g., Kaplan et al. report $b=0.76$ for dense models). Empirically, Hybrid systems require 6.2 $\times$ more turns than SAS (44.3 vs. 7.2 turns; $t(178)=16.8$, $p<0.001$), while Centralized requires 3.8 $\times$ (27.7 turns), and Decentralized requires 3.6 $\times$ (26.1 turns). The implication is stark: under fixed computational budgets, per-agent reasoning capacity becomes prohibitively thin beyond 3–4 agents, creating a hard resource ceiling where communication cost dominates reasoning capability.Message Density Exhibits Logarithmic Saturation with Performance.
Success rate follows a logarithmic relationship with message density across all architectures:
$ S = 0.73 + 0.28 \ln(c), \quad R^2 = 0.68, \quad p < 0.001, $
where $c$ is messages per reasoning turn. Performance plateaus near $c^* = 0.39$ messages/turn (achieved by Decentralized and Centralized architectures at 0.41 and 0.39 respectively), corresponding to the success rates of 47.7% and 46.3%. Beyond this point, additional messages yield diminishing returns: Hybrid systems (515% coordination overhead, $T=44.3$) shows -2.4% versus Centralized (285% overhead, $T=27.7$), a difference of 1.1% that is not statistically significant ($t(178)=0.61$, $p=0.542$). This saturation reflects fundamental information limits in open-ended reasoning rather than mechanism failures: high-performing runs show convergent token overlap (shared tokens: mean $\approx 1.8$ bits; $p<0.001$ vs. low performers) suggesting message consensus is reached; further messages add redundancy rather than novel information.
Error absorption mechanisms.
We formalize error absorption as $\text{Absorb} = (E_{\text{SAS}} - E_{\text{MAS}})/E_{\text{SAS}}$, where $E$ is factual error rate. The absorption mechanism operates through iterative verification: in Centralized and Hybrid architectures, sub-agent outputs pass through an orchestrator that cross-checks reasoning steps before aggregation, enabling detection and correction of logical inconsistencies. In Decentralized architectures, peer debate rounds provide similar verification through explicit challenge-response exchanges. These architectures achieve 22.7% average error reduction ($95%$ CI: $[20.1%, 25.3%]$), peaking at 31.4% for Finance Agent where structured numerical outputs facilitate verification. Independent MAS shows no error correction ($+4.6%$ amplification) due to absence of any inter-agent verification mechanism where errors made by individual agents propagate directly to the aggregated output without opportunity for correction.
The correction mechanism is revealed through token-overlap analysis. Each token in agent rationales is labeled as: (i) unique (appears in exactly one agent); (ii) shared (two or more agents); (iii) contradictory (semantic opposition, BERTScore
lt; 0.3$). High-performing runs exhibit: (i) increased shared-token entropy (mean $\approx 1.8$ bits for Finance Agent; $p<0.001$ vs. low-performing runs); (ii) dramatically reduced contradictory mass (median 2.3% in successes vs. 8.1% in failures), evidence that messages converge toward mutually consistent sub-proofs rather than self-reinforcing errors. Interestingly, high redundancy ($R > 0.50$) correlates negatively with success ($r = -0.136$, $p = 0.004$), implying an emergent diversity-efficiency trade-off: collective capability peaks when message overlap balances shared grounding with informational diversity; optimal redundancy occurs at $R \approx 0.41$ (Centralized median), balancing information fusion with reasoning independence.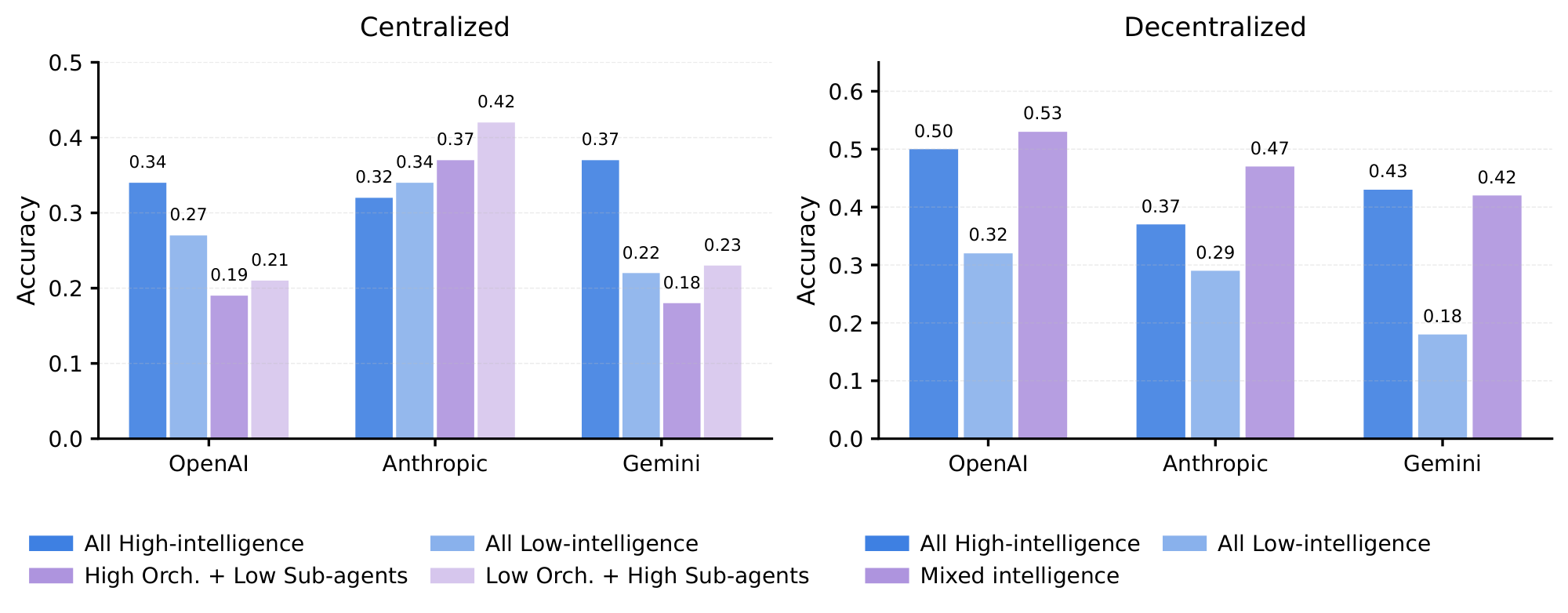
Error Taxonomy Reveals Architecture-specific Failure Modes.
We identified four error categories as follows.
(1) Logical Contradiction: agent asserts both "X is true" and "X is false" about the same entity, or derives conclusions violating its stated premises; (2) Numerical Drift: accumulated computational error from cascading rounding or unit conversion mistakes, measured as relative deviation from ground truth exceeding 5%; (3) Context Omission: failure to reference previously established entities, relationships, or state information required for the current reasoning step; (4) Coordination Failure (MAS-specific): message misinterpretation, task allocation conflicts, or state synchronization errors between agents. Architecture-specific patterns emerge across these categories:
- Logical Contradiction: Baseline 12.3–18.7%. Centralized reduces to 9.1% (36.4% reduction) via consensus; Decentralized achieves 11.5% through peer verification; Independent unchanged at 16.8%.
- Numerical Drift: Baseline 20.9–24.1%. Centralized/Decentralized reduce to 18.3% (24% reduction) via sub-problem verification; Hybrid amplifies to 26.4% as rounding errors propagate; Independent unchanged at 23.2%.
- Context Omission: Baseline 15.8–25.2%. Centralized reduces to 8.3% (66.8% reduction) via orchestrator synthesis; Decentralized achieves 11.2%; Independent unchanged at 24.1%.
- Coordination Failure: Only appears in MAS. Independent: 0% (no coordination mechanism); Centralized: 1.8%; Decentralized: 3.2%; Hybrid: 12.4% (protocol complexity exceeds robust implementation).
These patterns identify three operational coordination regimes: (i) Under-coordination ($O < 100%$ overhead): minimal accuracy gain ($\Delta S \approx +2$ –4%), coordination mechanisms not yet engaged; (ii) Optimal band ($200% < O < 300%$ overhead): highest success–cost ratio ($E_c \approx 0.16$), dominated by Centralized and Decentralized, with strong error absorption; (iii) **Over-coordination** ($O > 400%$ overhead): Hybrid runs with reduced efficiency ($E_c \approx 0.11$), protocol complexity introducing coordination-failure modes. Error amplification analysis confirms: Independent architectures propagate errors to 17.2 $\times$ baseline ($95%$ CI: $[14.3, 20.1]$; no correction mechanisms), while Centralized contains to 4.4 $\times$ ($[3.8, 5.0]$) through supervised aggregation.
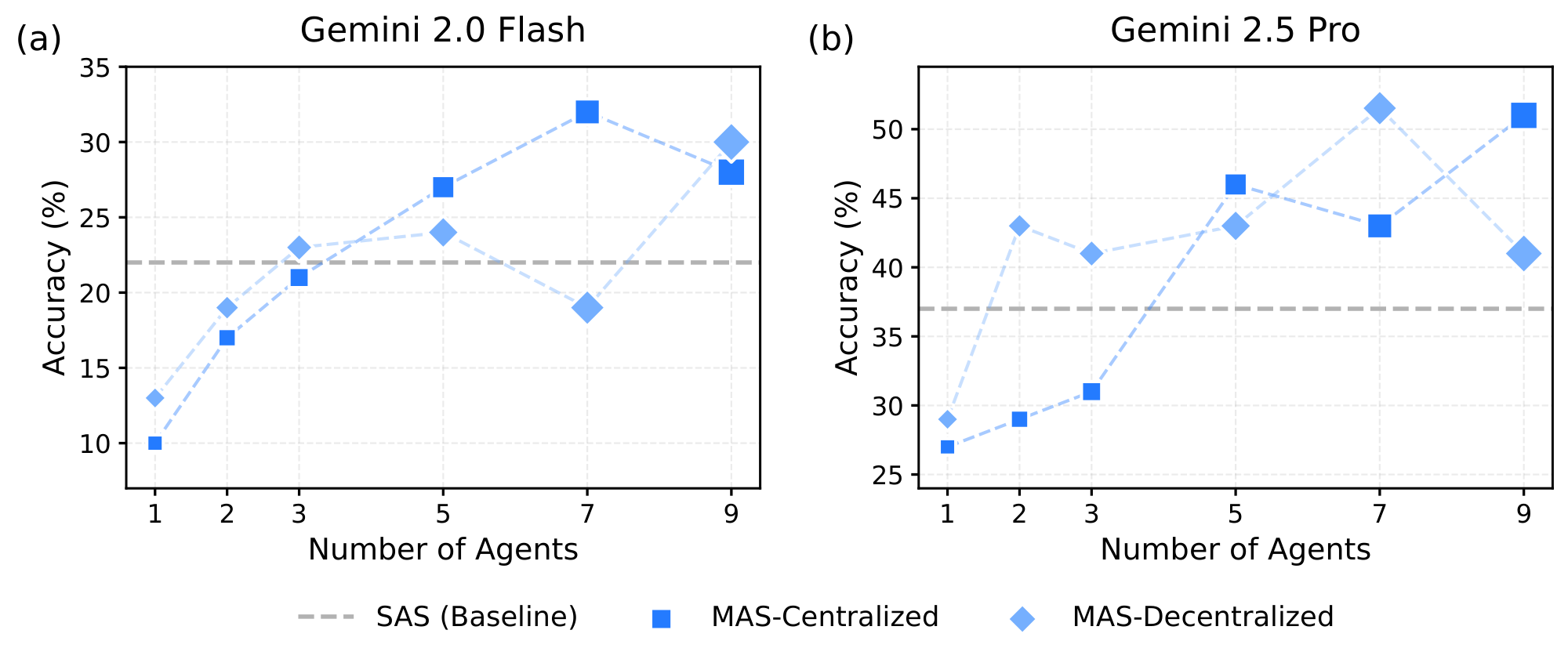
Information Gain (IG) Predicts MAS benefit in Low-Complexity Domains.
We compute information gain $\Delta \mathcal{I}$ by comparing pre-coordination and post-coordination task-uncertainty surrogates (via Bayesian posterior variance reduction on key variables). In structured domains (Finance Agent, Workbench), $\Delta \mathcal{I}$ correlates strongly with MAS–SAS gap ($r = 0.71$, $p < 0.001$), indicating that agents successfully exchange high-value information and synthesize it into improved solutions. In Finance Agent specifically, $\Delta \mathcal{I}$ ranges 0.8–2.1 bits (mean 1.4) for successful trials vs. 0.2–0.6 bits (mean 0.4) for failures.
Conversely, in open-world domains (BrowseComp-Plus), $\Delta \mathcal{I}$ shows weak and non-significant power, revealing that agents' messages provide limited validated information due to inherent world ambiguity. This domain-dependent information-gain pattern directly maps to observed MAS benefits: Finance Agent (+23.1%) where information exchange is high-value; BrowseComp-Plus (+6%–8%) where world ambiguity limits verification.
Cross-Domain Generalization Validates Coordination Principles.
Architectural rankings remained stable across domains (Kendall $\tau = 0.89$, coefficient of variation
lt; 0.1$ across architectures), indicating coordination principles transcend specific task structures. Extrapolation to larger teams ($n=6$ –10) via the fitted power law yields 95% prediction intervals $[3.2, 6.8]\times$ turn-count increases (bootstrap coverage 94.2%), with high confidence in scaling behavior. Specifically, at $n=6$ agents, predicted turns range from 12.8 to 20.1 (SAS: 7.2; Centralized would reach $\approx 85$ –130 turns). This super-linear scaling confirms the hard resource ceiling: beyond 3–4 agents, per-agent reasoning quality degrades sharply under fixed budgets.Economic Efficiency and Family-Specific Cost-Benefit Trade-offs.
Token efficiency (success per 1, 000 tokens) reveals sharp trade-offs by architecture and family: SAS achieves 67.7 successes/1K tokens; Centralized drops to 21.5 (3.1 $\times$ worse); Decentralized to 23.9 (2.8 $\times$ worse); Hybrid to 13.6 (5.0 $\times$ worse). Absolute dollar costs per trial vary by model: OpenAI Hybrid achieves marginal cost $\approx$0.008$ per 1% success gain (steep but manageable for structured tasks), while Anthropic Hybrid reaches $\approx$0.024$ per 1% gain (3 $\times$ worse, reflecting Anthropic's sensitivity to coordination overhead). Google maintains intermediate costs $\approx$0.012$ per 1% gain across architectures, suggesting more balanced cost-benefit trade-offs.
LLM Family-specific Deployment Signatures and Model-Architecture Alignment.
Cross-family analysis reveals distinct architectural preferences. OpenAI models show strongest Hybrid synergy on structured tasks (Finance: 52% success Hybrid vs. 39% SAS; Workbench: 56% Hybrid vs. 42% SAS). Anthropic models display most conservative, stable Centralized performance (mean 43% across tasks, SD = 2.3%, lowest variance). Google models exhibit robust cross-architecture efficiency (performance range < 5% across topologies). These patterns reflect fundamental differences in attention mechanisms, activation sparsity, and representation geometry enabling or constraining multi-agent interaction, not superficial hyperparameter differences.
5. Limitations and Future Works
Section Summary: This research on multi-agent AI systems uncovers useful scaling rules but hits several roadblocks, like communication overload and dropping efficiency when teams grow beyond a handful of agents, raising doubts about whether larger groups can naturally organize or specialize without major hurdles. It also notes gaps in testing diverse AI models with different designs or skills, struggles in tool-rich settings that bog down coordination, and the fact that generic prompts and a limited set of test scenarios might skew results. Looking ahead, improving prompts for specific AIs, expanding to more varied real-world tasks like robotics or long-term planning, and cutting costs through smarter designs could make these agent teams more practical and robust.
While this work provides quantitative scaling principles for agent systems across architectures and model families, several limitations remain. (i) Our framework systematically compares canonical coordination structures (Independent, Decentralized, Centralized, and Hybrid) with preliminary exploration of scaling number of agents up to nine. However, our empirical findings suggest that scaling to larger collectives may face fundamental barriers: the communication overhead we measured grows superlinearly with agent count, and coordination efficiency degrades substantially beyond moderate team sizes. Whether such collectives can exhibit beneficial emergent behaviors, such as spontaneous specialization or hierarchical self-organization, or whether communication bottlenecks dominate remains an open question that parallels phase transitions in complex adaptive systems. (ii) While we explore capability heterogeneity by mixing models of different intelligence levels within the same LLM family, all agents share identical base architectures differing only in scale and role prompts. Future work should investigate teams combining fundamentally different model architectures, domain-specialized fine-tuning, or complementary reasoning strategies to understand when epistemic diversity yields robustness rather than coordination noise. (iii) Our analysis reveals that tool-heavy environments represent a primary failure mode for multi-agent coordination, with significant negative interactions between tool count and system efficiency. Developing specialized coordination protocols for tool-intensive tasks, such as explicit tool-access scheduling, capability-aware task routing, or hierarchical tool delegation, represents an important direction for improving multi-agent reliability. (iv) While we controlled prompts to be identical across conditions for experimental validity, we did not optimize prompts specifically for each model or model family. Given known sensitivity of LLM behavior to prompt formulation, architecture-specific prompt tuning may yield different scaling characteristics than those reported here. (v) Our analysis spans four agentic benchmarks, which, while diverse in task structure (deterministic tool use, quantitative reasoning, sequential planning, dynamic web navigation), may not capture the full spectrum of agentic task characteristics. The strong differentiation in MAS effectiveness across these four benchmarks (Figure 2) suggests that additional environments, particularly those with intermediate characteristics or novel task structures such as embodied agents, multi-user interaction, or long-horizon temporal dependencies would strengthen confidence in the identified thresholds and scaling principles. (vi) The economic viability of multi-agent scaling remains a practical barrier. As shown in our cost analysis (Section 4.4), token consumption and latency grow substantially with agent count, often without proportional performance gains. Future work should explore efficiency-oriented designs, such as sparse communication, early-exit mechanisms, or distilled coordinator models, to make multi-agent deployments economically feasible at scale. Additionally, current agentic benchmarks capture dynamic text-based environments but do not yet include long-horizon temporal dependencies or real-world feedback loops. Integrating embodied or multimodal settings (e.g., robotic control, medical triage, multi-user social interaction) will test whether our observed scaling principles generalize beyond symbolic domains.
6. Conclusion
Section Summary: This study analyzed scaling rules for AI agent teams through 180 experiments using different AI models and tasks, uncovering key trade-offs like coordination challenges in tool-intensive work, reduced benefits once teams reach about 45% of solo performance, and error spikes that vary by team setup. Performance improvements differ widely depending on the task—boosting results by up to 81% in finance scenarios but dropping by 70% in planning ones—showing that success hinges more on how well a task can be broken down than on team size. The research offers a reliable prediction tool for choosing the best team structure, validated on newer AI systems, to guide real-world applications based on task characteristics.
This study quantifies scaling principles for agentic systems across 180 controlled experiments spanning three LLM families and four agentic benchmarks. We reveal that multi-agent performance is governed by quantifiable trade-offs: a tool-coordination trade-off where tool-heavy tasks suffer from coordination overhead, capability saturation where coordination yields diminishing returns beyond $\sim$ 45% single-agent baselines, and architecture-dependent error amplification ranging from 4.4 $\times$ (centralized) to 17.2 $\times$ (independent). Performance gains vary dramatically by task structure, from +80.9% on Finance Agent to $-$ 70.0% on PlanCraft, demonstrating that coordination benefits depend on task decomposability rather than team size. We derive a predictive model ($R^2$ =0.524) that achieves 87% accuracy in selecting optimal architectures for held-out configurations. Out-of-sample validation on GPT-5.2, released after our study, confirms that four of five scaling principles generalize with MAE=0.071. These results provide practitioners with quantitative guidance for architecture selection based on measurable task properties.
Appendix
Section Summary: This appendix section introduces the Model Intelligence Index, a standardized measure adapted from Artificial Analysis to evaluate the core reasoning, knowledge, math, coding, and problem-solving abilities of large language models used in the study, ensuring it's independent of any agentic or collaborative features. To cover more models, the authors reproduced key evaluations themselves when official scores weren't available, combining results into a composite index while adding details like context window size and performance metrics in a summary table. They emphasize caution with these reconstructed estimates due to potential variations in testing and incomplete replication of private procedures.
Appendix
Section Summary: This appendix section introduces the Model Intelligence Index, a standardized measure adapted from Artificial Analysis to evaluate the core reasoning, knowledge, math, coding, and problem-solving abilities of large language models used in the study, ensuring it's independent of any agentic or collaborative features. To cover more models, the authors reproduced key evaluations themselves when official scores weren't available, combining results into a composite index while adding details like context window size and performance metrics in a summary table. They emphasize caution with these reconstructed estimates due to potential variations in testing and incomplete replication of private procedures.
A. Model Intelligence Index
To quantify the capabilities of LLMs used in our study, we adopt while extending the Artificial Analysis Intelligence Index^3. This index provides one of the most comprehensive publicly available syntheses of model capabilities, combining performance across reasoning, knowledge, mathematics, coding, instruction following, long-context reasoning, and agentic workflow tasks. Its construction integrates eight evaluation suites (e.g., MMLU-Pro ([55]), GPQA Diamond ([56]), HLE ([57]), AIME 2025, SciCode ([58]), LiveCodeBench ([59]), IFBench ([60]), AA-LCR ([61]), Terminal-Bench Hard, and $\tau^2$-Bench Telecom ([24])), with careful standardization, robust answer extraction, and model-agnostic prompting. Our study requires a unified, quantitative measure of a model’s baseline capabilities that is independent of any agentic mechanism or multi-agent collaboration structure. The Intelligence Index meets this requirement by: (i) evaluating all models under consistent, zero-shot, instruction-prompted conditions; (ii) employing pass@1 scoring and robust equality-checker mechanisms; (iii) reporting a composite measure reflecting general-purpose reasoning and problem-solving ability; and (iv) demonstrating high statistical reliability (reported confidence interval below $\pm 1%$). This makes it suitable as a foundational axis for studying how agentic performance scales with underlying model capacity.
Beyond Artificial Analysis Evaluations.
Artificial Analysis reports Intelligence Index scores for a growing but still limited subset of frontier models. Our work requires a broader coverage, including several models that are not yet benchmarked on the official platform. For these models, we independently reproduced a subset of the Intelligence Index evaluations, specifically AA-LCR ([61]), HLE ([57]), MMLU-Pro ([55]), GPQA Diamond ([56]), AIME 2025, LiveCodeBench ([59]), SciCode ([58]), and IFBench ([60]) using the publicly disclosed methodology, prompts, scoring procedures, and evaluation environments described by Artificial Analysis. For the models without publicly available results, we computed a reconstructed Intelligence Index following the equal-weighting formulation used in Intelligence Index v3.0. In cases where full reproduction was infeasible (e.g., specific agentic workflow tasks or unavailable context window limits), we report approximate estimates (denoted with *) and discuss their limitations transparently. These reconstructed values should be interpreted as methodologically consistent but not officially certified estimates. [@tab:intelligence_index] summarizes the reconstructed Intelligence Index and underlying component scores for all models used in our study. The table includes: (i) official Intelligence Index values when available; (ii) reconstructed values for non-reported models; (iii) all constituent evaluation scores used to compute the aggregate index; (iv) additional model metadata (context window, cost, throughput, latency) relevant for agentic performance analysis.
:::
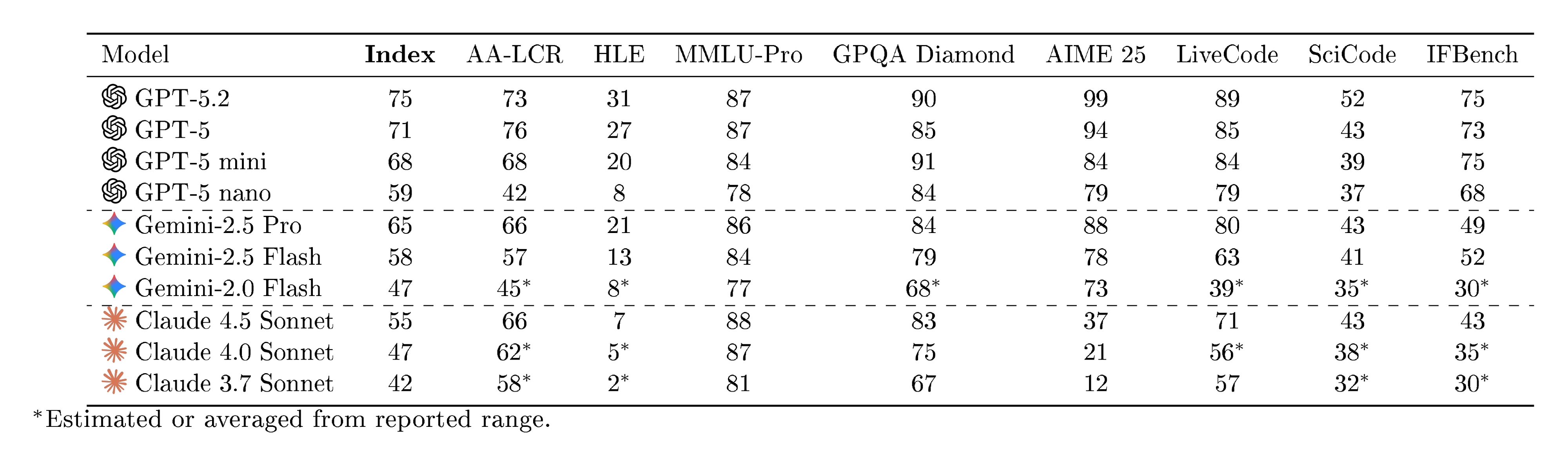
Table 6: Intelligence Index (non-agentic capability) for LLMs used in our experiments.
:::
Our reconstructed Intelligence Index values should be interpreted with appropriate caution. First, several evaluations, particularly long-context and agentic workflow tasks, contain nondeterministic components that may vary slightly across implementations. Second, for models without public API support for large-context evaluation (e.g., "non-reasoning" checkpoints), our long-context estimates represent upper-bound approximations based on available context windows and internal model behavior. Third, Artificial Analysis maintains private test variants and additional filtering procedures that cannot be fully reproduced. Thus, our estimates provide a methodologically aligned but not officially verified extension.
:Table 7: Out-of-sample validation metrics for GPT-5.2 on BrowseComp-Plus.
| Metric | Value | Status |
|---|---|---|
| Mean Absolute Error (MAE) | 0.071 | lt;0.10$ \checkmark |
| Mean Absolute Percentage Error (MAPE) | 15.8% | Acceptable |
| Normalized MAE$^\dagger$ | 0.045 | \checkmark |
| Qualitative Findings Validated | 4/5 | Partial$^\ddagger$ |
| Kendall’s $\tau$ (Ranking) | 0.200 | Weak |
\begin{tabularx}{\ccccccccc}{X X c} \toprule \textbf{Finding} & \textbf{GPT-5.2 Result} & \textbf{Valid} \\ \midrule Capability Ceiling: $P_{\text{SA}} \geq 0.45 \Rightarrow$ diminishing MAS returns ($\hat{\beta} = -0.404$) & $P_{\text{SA}} = 0.45$; best MAS gain $= +6.7\%$ & \checkmark \\ Independent MAS Degradation: Independent architecture underperforms SAS & Independent $= 0.35$ vs SAS $= 0.45$ ($-22.2\%$) & \checkmark \\ Optimal Architecture: Centralized/Decentralized excel on BrowseComp-Plus & Best: Centralized \& Decentralized (tied at 0.48) & \checkmark \\ Hybrid Overhead: 515\% overhead degrades performance & Hybrid $= 0.39$ vs SAS $= 0.45$ ($-13.3\%$) & \checkmark \\ BrowseComp Pattern: Decentralized gt;$ Centralized on dynamic web tasks & Decentralized $= 0.48$, Centralized $= 0.48$ & Partial$^\dagger$\\ \bottomrule \end{tabularx}
:::
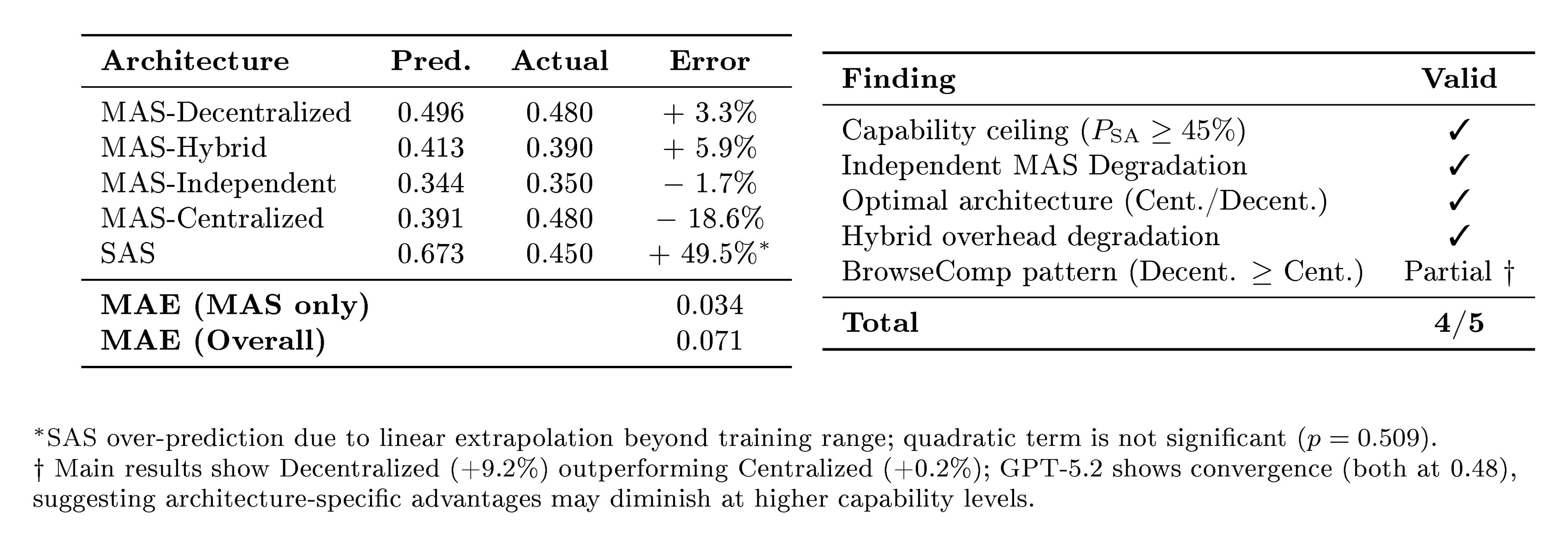
Table 9: Out-of-sample validation on GPT-5.2 (Intelligence Index = 75). Left: prediction accuracy by architecture. Right: validation of theoretical findings. The scaling equation (1), trained on Index 42–71, achieves MAE = 0.071 and validates four of five qualitative predictions when extrapolating to higher-capability models.
:::
B. Out-of-Sample Validation
To assess the generalizability of our scaling equation beyond the training distribution, we evaluate on GPT-5.2 (Intelligence Index = 75), released after our experimental campaign. This represents extrapolation: our training data spans Index 42–71, while GPT-5.2 exceeds this range by 4% (5.6% beyond maximum). [@tab:gpt52_validation] summarizes validation metrics. The scaling equation achieves MAE = 0.071, meeting our
lt;0.10$ threshold for practical utility. Critically, four of five qualitative findings from Section 4 generalize to this higher-capability regime ([@tab:gpt52-findings]): the capability ceiling effect persists ($P_{SA}=0.45$, best MAS gain = +6.7%, consistent with diminishing returns at high baselines), Independent MAS exhibits predicted degradation (-22.2%), and Centralized/Decentralized architectures achieve optimal performance. The partial validation concerns the Decentralized gt;$ Centralized pattern: while the main results show a clear Decentralized advantage over SAS (+9.2% vs. +0.2%), GPT-5.2 shows convergence (both at 0.48), suggesting that architecture-specific advantages may decrease as the model capability increases. Architecture-wise analysis ([@tab:validation_combined]) reveals that MAS predictions are well-calibrated (average error = 7.4%), while SAS shows systematic over-prediction (+49.5%). This bias does not stem from the quadratic intelligence term, which is not significant after centering ($\hat{\beta}_{I^2}=0.007$, $p=0.509$). Instead, the over-prediction likely reflects limitations in linear extrapolation of the capability effect ($\hat{\beta}_I=0.171$) beyond the training range (Index 42–71 to 75), where diminishing returns may emerge that are not captured by the current functional form. Future work should explore saturation functions or piecewise-linear specifications for extreme capability levels. These results validate our core contribution: the scaling equation captures architectural trade-offs that generalize across capability levels, even when absolute calibration requires refinement for extrapolation.Architecture Selection Accuracy.
We note an important caveat regarding architecture selection when the model is at at extreme capability level. The scaling equation predicts SAS as optimal for GPT-5.2 ($\hat{P}{\text{SAS}}=0.673$), yet empirically MAS-Centralized and MAS-Decentralized achieve superior performance (0.48 vs. 0.45). This discrepancy does not arise from the quadratic intelligence term, which is not significant after mean-centering ($\hat{\beta}{I^2}=0.007$, $p=0.509$). Rather, the over-prediction reflects the linear intelligence effect ($\hat{\beta}_I=0.171$) extrapolating beyond its training range, potentially encountering diminishing returns at higher capability levels not captured by the current specification. The 87% architecture selection accuracy reported in Subsection Section 4.3 applies within the training range (Intelligence Index 42–71); extrapolation to Index 75 reduces this to 0% for SAS prediction but maintains 75% accuracy for MAS architecture ranking (3/4 correct: Decentralized, Hybrid, Independent). This suggests that while absolute performance predictions require recalibration for frontier models, relative MAS architecture rankings remain reliable.
C. Domain Complexity
We quantify domain complexity through a composite metric that captures empirical difficulty across evaluated benchmarks. This principled approach enables systematic analysis of when multi-agent coordination yields performance benefits versus incurring prohibitive overhead.
C.1 Complexity Metric Construction
Domain complexity $D \in [0, 1]$ is computed as the conservative average of three complementary measures:
- Performance Ceiling. Defined as $1 - p_{\max}$, where $p_{\max}$ is the highest performance achieved by any evaluated system. Lower ceilings indicate greater inherent task difficulty.
- Coefficient of Variation. Computed as $\sigma / \mu$, where $\sigma$ and $\mu$ denote the standard deviation and mean of performance across all configurations. This scale-invariant measure captures relative variability independent of absolute performance ranges.
- Best-Model Baseline. Defined as $1 - p_{\text{best}}$, where $p_{\text{best}}$ is the state-of-the-art single-model performance on each dataset, providing an upper bound on achievable accuracy.
The final complexity score is the arithmetic mean of these three components, yielding a robust estimate that mitigates sensitivity to any single measure.
C.2 Domain Characterisation
[@tab:domain_complexity] summarises the complexity scores and defining characteristics of each benchmark.
:Table 10: Domain complexity scores and task characteristics.
| Domain | $D$ | Characteristics |
|---|---|---|
| Workbench | 0.000 | Minimal sequential constraints; well-structured procedural reasoning with clear subtask boundaries; low coordination requirements |
| Finance Agent | 0.407 | Moderate decomposability; structured domains amenable to localised agent reasoning |
| PlanCraft | 0.419 | High sequential dependencies; constraint satisfaction requiring ordered reasoning steps |
| BrowseComp-Plus | 0.839 | Dynamic state evolution; complex visuospatial reasoning with interaction-heavy environments |
C.3 Critical Threshold
Our analysis identifies a critical complexity threshold at $D \approx 0.40$. Below this threshold, multi-agent architectures yield net positive returns through effective task decomposition and parallel reasoning. Above this threshold, coordination overhead consumes computational resources otherwise allocated to reasoning, resulting in performance degradation. This finding suggests that the suitability of multi-agent approaches is fundamentally constrained by domain-intrinsic properties rather than architectural sophistication alone.
D. Datasets
We evaluate our agent systems across four agentic benchmarks requiring multi-step reasoning and tool interaction. Each dataset emphasizes different aspects of agentic behavior: information retrieval, domain expertise, planning, and task decomposition.
Finance Agent.
We use the Finance Agent benchmark ([31]), comprising 50 finance questions requiring domain expertise and multi-step analysis. Tasks include earnings analysis, financial metric calculations, and market trend interpretation. Each instance includes expert-provided rubrics for structured evaluation. Questions typically require 15-30 minutes of expert time, indicating substantial complexity.
BrowseComp Plus.
BrowseComp Plus ([30]) contains 100 web browsing tasks requiring multi-website information synthesis. Tasks include comparative analysis, fact verification, and comprehensive research across multiple web sources. Each instance requires agents to navigate complex information landscapes, extract relevant details, and synthesize findings. The dataset uses LLM-based evaluation comparing agent responses against ground truth answers with confidence scoring.
WorkBench.
WorkBench ([32]) evaluates business task automation through function calling sequences. The dataset covers five domains: analytics, calendar management, email operations, project management, and customer relationship management. Success requires executing correct tool sequences to accomplish realistic business workflows. Evaluation follows outcome-centric assessment, measuring exact match between predicted and expected function call sequences. The dataset supports 100 distinct business scenarios with tolerance for minor date variations.
Plancraft.
Plancraft ([21]) focuses on sequential planning in Minecraft environments. Agents must craft target items by determining optimal action sequences using available inventory and crafting recipes. Tasks require multi-step reasoning about dependencies, resource management, and action ordering. The dataset uses environment-determined success metrics based on successful item crafting within step limits. We use the plancraft-test subset containing focused planning challenges.
E. Implementation Details
E.1 Technical Infrastructure
Our implementation leverages LiteLLM^4 for unified API access across model providers and LangChain^5 for agent orchestration and tool integration. LiteLLM provides standardized interfaces for OpenAI, Gemini, and Anthropic models, enabling seamless model switching and comparison. LangChain facilitates tool binding, conversation management, and structured prompting.
API Integration.
We access LLMs through provider-specific APIs: OpenAI API for GPT models (gpt-5, gpt-5-mini, gpt-5-nano), GenAI API for Gemini models (gemini-2.5-pro, gemini-2.5-flash, gemini-2.0-flash), and Anthropic API for Claude models (claude-4.5-sonnet, claude-4.0-sonnet, claude-3.7-sonnet). Our implementation includes intelligent API key rotation across multiple keys per provider to handle rate limiting and quota management. Context window management automatically truncates conversation history when token limits are approached.
Tool Environment.
Each dataset defines its tool ecosystem through environment configurations. Tools include web search (Tavily^6), code execution (Python REPL), mathematical operations, and task completion markers. Tool definitions use LangChain's BaseTool interface with structured input schemas and execution methods. Tools are dynamically bound to LLM instances using function calling capabilities when available.
E.2 Agent Configuration
Architecture Parameters.
Single agents use maximum 10 iterations per instance. Independent multi-agent systems deploy 3 agents with synthesis-only coordination. Centralized systems employ 3 sub-agents with 1 orchestrator across maximum 5 orchestration rounds, with 3 iterations per agent per round. Decentralized systems run 3 agents through 3 debate rounds with 3 iterations per round. Hybrid systems combine centralized orchestration with limited peer communication phases.
Heterogeneous Models.
Our framework supports heterogeneous configurations where different agent roles use different models. Orchestrators can use high-capability models (e.g., GPT-5) while sub-agents use efficient models (e.g., Gemini-2.0 Flash). The LLMConfig class manages model assignment with automatic LLM instance creation for each agent role. Decentralized systems can assign different models to different workers for diversity.
E.3 Prompt Compilation System
We implement a structured prompting system supporting named templates and variable interpolation. Prompts are defined in YAML files with base templates and role-specific extensions. The compilation process performs template variable replacement using double-brace syntax ({{variable}}) and supports conditional template selection based on agent type and conversation state.
Dataset Integration.
Each dataset provides shared prompt templates containing task-specific instructions and examples. Dataset instances contribute prompt variables including problem descriptions, context, and constraints. The prompt compilation system merges agent prompts with dataset templates, ensuring consistent instruction delivery across architectures while maintaining task specificity.
E.4 Evaluation Methodology
Sample Sizes.
We evaluate on dataset subsets balancing computational cost with statistical significance: Finance Agent (50 instances), BrowseComp Plus (100 instances), WorkBench (100 instances), and Plancraft (100 instances). Instance selection ensures representative coverage of task types and difficulty levels within each benchmark.
Restrictions and Controls.
All experiments use identical tool interfaces and observation structures across architectures to eliminate external feedback confounds. Context window management applies consistent truncation policies. API rate limiting and retry mechanisms ensure fair resource allocation. Evaluation uses frozen model weights without fine-tuning to measure architectural effects independently of model optimization.
E.5 Information Gain Computation
Information gain $\Delta\mathcal{I}$ quantifies the reduction in task uncertainty achieved through agent coordination. We estimate this via Bayesian posterior variance reduction:
$ \Delta\mathcal{I} = \frac{1}{2}\log\frac{\text{Var}[Y | \mathbf{s}{\text{pre}}]}{\text{Var}[Y | \mathbf{s}{\text{post}}]} $
where $Y \in {0, 1}$ is the task success indicator, $\mathbf{s}{\text{pre}}$ is the agent's state representation before coordination (initial reasoning trace), and $\mathbf{s}{\text{post}}$ is the state after coordination (final aggregated output). Variances are estimated via Monte Carlo sampling: we generate $K=10$ reasoning traces per state using temperature $\tau=0.7$ and compute empirical variance of predicted success probabilities. For binary outcomes, this reduces to:
$ \text{Var}[Y | \mathbf{s}] = \hat{p}(\mathbf{s})(1 - \hat{p}(\mathbf{s})), $
where $\hat{p}(\mathbf{s})$ is the mean predicted success probability across samples.
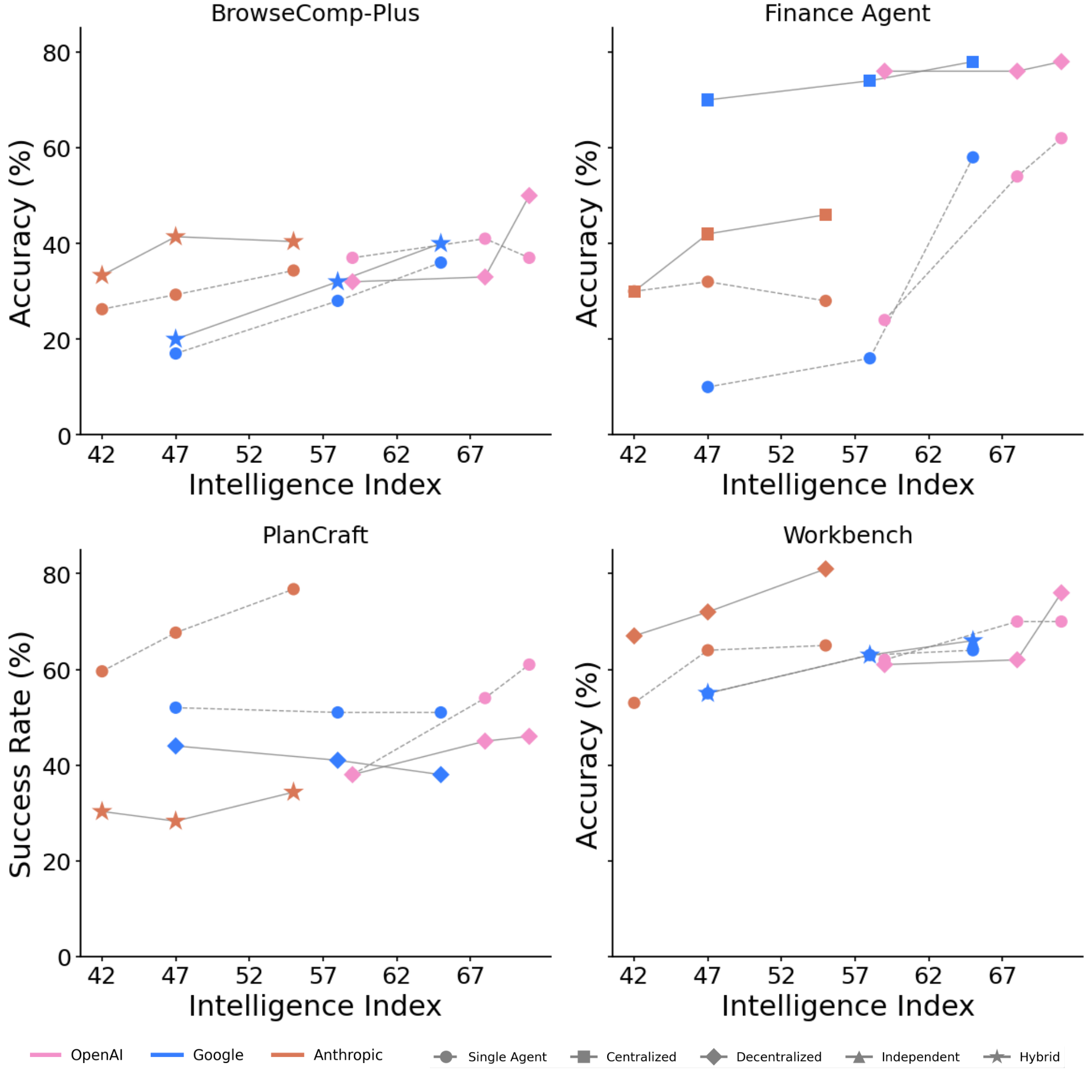
References
[1] Wang et al. (2024). A survey on large language model based autonomous agents. Frontiers of Computer Science. 18(6). pp. 186345.
[2] Zhang et al. (2024). CodeAgent: Enhancing Code Generation with Tool-Integrated Agent Systems for Real-World Repo-level Coding Challenges. In Proceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers). pp. 13643–13658.
[3] Yang et al. (2024). Swe-agent: Agent-computer interfaces enable automated software engineering. Advances in Neural Information Processing Systems. 37. pp. 50528–50652.
[4] Wei et al. (2025). BrowseComp: A Simple Yet Challenging Benchmark for Browsing Agents. arXiv preprint arXiv:2504.12516.
[5] Yao et al. (2022). Webshop: Towards scalable real-world web interaction with grounded language agents. Advances in Neural Information Processing Systems. 35. pp. 20744–20757.
[6] Heydari et al. (2025). The anatomy of a personal health agent. arXiv preprint arXiv:2508.20148.
[7] McDuff et al. (2025). Towards accurate differential diagnosis with large language models. Nature. pp. 1–7.
[8] Kim et al. (2024). Mdagents: An adaptive collaboration of LLMs for medical decision-making. Advances in Neural Information Processing Systems. 37. pp. 79410–79452.
[9] Yu et al. (2025). Finmem: A performance-enhanced LLM trading agent with layered memory and character design. IEEE Transactions on Big Data.
[10] Zhang et al. (2025). Towards Autonomous Sustainability Assessment via Multimodal AI Agents. arXiv preprint arXiv:2507.17012.
[11] Gottweis et al. (2025). Towards an AI co-scientist. arXiv preprint arXiv:2502.18864.
[12] Ludovico Mitchener et al. (2025). Kosmos: An AI Scientist for Autonomous Discovery. https://arxiv.org/abs/2511.02824.
[13] Tran et al. (2025). Multi-Agent Collaboration Mechanisms: A Survey of LLMs. arXiv preprint arXiv:2501.06322.
[14] Guo et al. (2024). Large language model based multi-agents: a survey of progress and challenges. In Proceedings of the Thirty-Third International Joint Conference on Artificial Intelligence. pp. 8048–8057.
[15] Junyou Li et al. (2024). More Agents Is All You Need. Transactions on Machine Learning Research. https://openreview.net/forum?id=bgzUSZ8aeg.
[16] Chen Qian et al. (2025). Scaling Large Language Model-based Multi-Agent Collaboration. In The Thirteenth International Conference on Learning Representations. https://openreview.net/forum?id=K3n5jPkrU6.
[17] Du et al. (2023). Improving factuality and reasoning in language models through multiagent debate. In Forty-first International Conference on Machine Learning.
[18] Weize Chen et al. (2024). AgentVerse: Facilitating Multi-Agent Collaboration and Exploring Emergent Behaviors. In The Twelfth International Conference on Learning Representations. https://openreview.net/forum?id=EHg5GDnyq1.
[19] Yuxuan Zhu et al. (2025). Establishing Best Practices in Building Rigorous Agentic Benchmarks. In The Thirty-ninth Annual Conference on Neural Information Processing Systems Datasets and Benchmarks Track. https://openreview.net/forum?id=E58HNCqoaA.
[20] Carlos E Jimenez et al. (2024). SWE-bench: Can Language Models Resolve Real-world Github Issues?. In The Twelfth International Conference on Learning Representations. https://openreview.net/forum?id=VTF8yNQM66.
[21] Dagan et al. (2024). Plancraft: an evaluation dataset for planning with LLM agents. arXiv preprint arXiv:2412.21033.
[22] Liu et al. (2024). AgentBench: Evaluating LLMs as Agents. In The Twelfth International Conference on Learning Representations.
[23] Sayash Kapoor et al. (2025). AI Agents That Matter. Transactions on Machine Learning Research. https://openreview.net/forum?id=Zy4uFzMviZ.
[24] Barres et al. (2025). $\tau^2$-bench: Evaluating conversational agents in a dual-control environment. arXiv preprint arXiv:2506.07982.
[25] Chen et al. (2021). Evaluating large language models trained on code. arXiv preprint arXiv:2107.03374.
[26] Sirui Hong et al. (2024). MetaGPT: Meta Programming for A Multi-Agent Collaborative Framework. In The Twelfth International Conference on Learning Representations. https://openreview.net/forum?id=VtmBAGCN7o.
[27] Gao et al. (2025). Single-agent or Multi-agent Systems? Why Not Both?. arXiv preprint arXiv:2505.18286.
[28] McGrath, Joseph E (1964). Social Psychology: A Brief Introduction.
[29] Lencioni, Patrick M (2002). The five dysfunctions of a team: A leadership fable. John Wiley & Sons.
[30] Chen et al. (2025). Browsecomp-plus: A more fair and transparent evaluation benchmark of deep-research agent. arXiv preprint arXiv:2508.06600.
[31] Bigeard et al. (2025). Finance Agent Benchmark: Benchmarking LLMs on Real-world Financial Research Tasks. arXiv preprint arXiv:2508.00828.
[32] Styles et al. (2024). Workbench: a benchmark dataset for agents in a realistic workplace setting. arXiv preprint arXiv:2405.00823.
[33] Shunyu Yao et al. (2023). ReAct: Synergizing Reasoning and Acting in Language Models. In The Eleventh International Conference on Learning Representations. https://openreview.net/forum?id=WE_vluYUL-X.
[34] Shinn et al. (2023). Reflexion: Language Agents with Verbal Reinforcement Learning. Advances in Neural Information Processing Systems. 36.
[35] Jason Wei et al. (2022). Emergent Abilities of Large Language Models. Transactions on Machine Learning Research. https://openreview.net/forum?id=yzkSU5zdwD.
[36] Weng, Lilian (2023). LLM Powered Autonomous Agents. Lil'Log. https://lilianweng.github.io/posts/2023-06-23-agent/.
[37] Xi et al. (2025). The Rise and Potential of Large Language Model Based Agents: A Survey. Science China Information Sciences. 68(1). pp. 121101.
[38] Dang et al. (2025). Multi-Agent Collaboration via Evolving Orchestration. arXiv preprint arXiv:2505.19591.
[39] Cemri et al. (2025). Why Do Multi-Agent LLM Systems Fail?. arXiv preprint arXiv:2503.13657.
[40] Guibin Zhang et al. (2025). Multi-agent Architecture Search via Agentic Supernet. In Forty-second International Conference on Machine Learning. https://openreview.net/forum?id=imcyVlzpXh.
[41] Anthropic (2024). How we built our multi-agent research system. Anthropic Engineering Blog. https://www.anthropic.com/engineering/multi-agent-research-system.
[42] Sumers et al. (2023). Cognitive architectures for language agents. Transactions on Machine Learning Research.
[43] Shuyan Zhou et al. (2024). WebArena: A Realistic Web Environment for Building Autonomous Agents. In The Twelfth International Conference on Learning Representations. https://openreview.net/forum?id=oKn9c6ytLx.
[44] Cobbe et al. (2021). Training verifiers to solve math word problems. arXiv preprint arXiv:2110.14168.
[45] Dan Hendrycks et al. (2021). Measuring Massive Multitask Language Understanding. In International Conference on Learning Representations. https://openreview.net/forum?id=d7KBjmI3GmQ.
[46] Rajpurkar et al. (2016). SQuAD: 100,000+ Questions for Machine Comprehension of Text. Proceedings of EMNLP.
[47] Frank F. Xu et al. (2025). TheAgentCompany: Benchmarking LLM Agents on Consequential Real World Tasks. In The Thirty-ninth Annual Conference on Neural Information Processing Systems Datasets and Benchmarks Track. https://openreview.net/forum?id=LZnKNApvhG.
[48] Davide Paglieri et al. (2025). BALROG: Benchmarking Agentic LLM and VLM Reasoning On Games. In The Thirteenth International Conference on Learning Representations. https://openreview.net/forum?id=fp6t3F669F.
[49] Kaplan et al. (2020). Scaling Laws for Neural Language Models. arXiv preprint arXiv:2001.08361.
[50] Chen et al. (2024). Are More LLM Calls All You Need? Towards Scaling Laws of Compound Inference Systems. arXiv preprint arXiv:2403.02419.
[51] Wu et al. (2024). Autogen: Enabling next-gen LLM applications via multi-agent conversations. In First Conference on Language Modeling.
[52] Smit et al. (2023). Should we be going mad? a look at multi-agent debate strategies for llms. arXiv preprint arXiv:2311.17371.
[53] Cohen, Jacob (1960). A coefficient of agreement for nominal scales. Educational and psychological measurement. 20(1). pp. 37–46.
[54] Zhang et al. (2019). Bertscore: Evaluating text generation with bert. arXiv preprint arXiv:1904.09675.
[55] Wang et al. (2024). Mmlu-pro: A more robust and challenging multi-task language understanding benchmark. Advances in Neural Information Processing Systems. 37. pp. 95266–95290.
[56] Rein et al. (2024). GPQA: A graduate-level google-proof q&a benchmark. In First Conference on Language Modeling.
[57] Phan et al. (2025). Humanity's last exam. arXiv preprint arXiv:2501.14249.
[58] Tian et al. (2024). Scicode: A research coding benchmark curated by scientists. Advances in Neural Information Processing Systems. 37. pp. 30624–30650.
[59] Naman Jain et al. (2025). LiveCodeBench: Holistic and Contamination Free Evaluation of Large Language Models for Code. In The Thirteenth International Conference on Learning Representations. https://openreview.net/forum?id=chfJJYC3iL.
[60] Pyatkin et al. (2025). Generalizing Verifiable Instruction Following. arXiv preprint arXiv:2507.02833.
[61] Artificial Analysis Team (2025). Artificial Analysis Long Context Reasoning Benchmark(LCR).