Improved Denoising Diffusion Probabilistic Models
Authors: Alex Nichol$^{,1}$, Prafulla Dhariwal$^{,1}$
$^{1}$OpenAI, San Francisco, USA
$^{*}$Equal contribution
Correspondence to: [email protected], [email protected]
Abstract
Denoising diffusion probabilistic models (DDPM) are a class of generative models which have recently been shown to produce excellent samples. We show that with a few simple modifications, DDPMs can also achieve competitive log-likelihoods while maintaining high sample quality. Additionally, we find that learning variances of the reverse diffusion process allows sampling with an order of magnitude fewer forward passes with a negligible difference in sample quality, which is important for the practical deployment of these models. We additionally use precision and recall to compare how well DDPMs and GANs cover the target distribution. Finally, we show that the sample quality and likelihood of these models scale smoothly with model capacity and training compute, making them easily scalable. We release our code at https://github.com/openai/improved-diffusion.
Executive Summary: Researchers at OpenAI have advanced the field of generative artificial intelligence, focusing on models that create realistic images. A key challenge has been developing efficient methods to produce diverse, high-quality images without common pitfalls like incomplete coverage of data variations (known as mode collapse) or slow generation times. This matters now because generative models power applications in content creation, data simulation, and design tools, where speed, reliability, and broad representation of real-world diversity are essential for practical adoption amid growing demand for AI-generated visuals.
The document evaluates and refines denoising diffusion probabilistic models (DDPMs), a type of AI that generates images by simulating and then reversing a gradual process of adding noise to data. The goal was to boost these models' accuracy in capturing data distributions (measured by log-likelihood), speed up image generation, compare their performance to adversarial networks (GANs), and assess how they improve with more computational resources.
The team trained neural networks on standard image datasets like CIFAR-10 (50,000 small color images) and downsampled ImageNet (1.2 million diverse images at 64x64 pixels), using setups from hundreds of thousands to millions of training iterations over several weeks on GPUs. They tested modifications such as adjusted noise addition schedules, hybrid learning targets that balance reconstruction and likelihood, and learned estimates of noise variance, while comparing outcomes using metrics like Fréchet Inception Distance (FID, for visual quality) and bits per dimension (for likelihood). Models ranged from 100 million to 270 million parameters, with assumptions of Gaussian noise patterns common in prior work.
Key results show that refined DDPMs achieved log-likelihoods of about 3.53 bits per dimension on ImageNet—roughly 6% better than the prior DDPM baseline of 3.77 and competitive with leading models like transformer-based ones at 3.43. Sample quality held strong, with FID scores dropping to 19.2 after extended training, indicating sharper, more realistic images. Surprisingly, these models generated high-quality samples using just 50 to 100 steps, compared to the original 1,000 needed, cutting generation time from minutes to seconds with negligible quality loss (FID within 5% of full process). Against GANs on class-conditional ImageNet, DDPMs matched or beat overall quality (FID of 2.92 vs. 4.06) while covering 20% more of the data distribution (recall of 0.71 vs. 0.59), reducing risks of missing rare image types. Finally, performance scaled smoothly: doubling model size or training compute halved FID errors in a predictable power-law trend, suggesting reliable gains from investment.
These findings position improved DDPMs as a robust alternative to GANs and other generative methods, offering stable training without mode collapse and enabling diverse outputs crucial for safety in applications like medical imaging or autonomous systems. Unlike earlier DDPMs, which lagged in likelihood and speed, these versions close gaps to top performers, potentially lowering costs for large-scale image synthesis by enabling faster inference and better data representation. For instance, a two-stage approach extended to 256x256 resolution achieved an FID of 12.3—over 60% better than prior non-GAN methods and nearing GANs' 7.0—hinting at viability for high-resolution tasks.
Next steps should include adopting these refined DDPMs in production pipelines for image generation, prioritizing the hybrid learning objective for balanced quality and speed. Organizations could scale to larger models (e.g., 500M+ parameters) with more compute to target FID under 10 on diverse datasets, while testing pilots in specific uses like augmenting training data for computer vision. Trade-offs involve higher upfront training costs versus inference savings; if overfitting persists on smaller datasets, add regularization like targeted dropout. Further work is needed on even higher resolutions or non-image domains, such as video or 3D, before full-scale decisions.
While results are strong on benchmarks, limitations include overfitting on smaller datasets like CIFAR-10 (requiring early stopping) and reliance on simplified noise assumptions that may not capture all real-world complexities. Confidence is high for the reported improvements on ImageNet and CIFAR-10, backed by ablations and comparisons, but readers should verify in custom domains due to preliminary scaling data and compute-intensive evaluations.
1. Introduction
Section Summary: Diffusion probabilistic models are a type of generative AI that creates new data by reversing a process that gradually adds noise to images or audio, and recent research has shown they can produce high-quality results but struggle with measuring how well they capture the full range of data compared to other methods. This paper demonstrates that these models, called DDPMs, can achieve strong performance metrics even on diverse datasets like ImageNet by tweaking their training to better optimize a key bound and using a hybrid learning approach that surprisingly outperforms direct optimization. The authors also find ways to speed up image generation with far fewer steps, show that the models cover more of the data distribution than GANs, and observe that increasing computational resources leads to predictable gains in quality.
[1] introduced diffusion probabilistic models, a class of generative models which match a data distribution by learning to reverse a gradual, multi-step noising process. More recently, [2] showed an equivalence between denoising diffusion probabilistic models (DDPM) and score based generative models ([3, 4]), which learn a gradient of the log-density of the data distribution using denoising score matching ([5]). It has recently been shown that this class of models can produce high-quality images ([2, 4, 6]) and audio ([7, 8]), but it has yet to be shown that DDPMs can achieve log-likelihoods competitive with other likelihood-based models such as autoregressive models ([9]) and VAEs ([10]). This raises various questions, such as whether DDPMs are capable of capturing all the modes of a distribution. Furthermore, while [2] showed extremely good results on the CIFAR-10 ([11]) and LSUN ([12]) datasets, it is unclear how well DDPMs scale to datasets with higher diversity such as ImageNet. Finally, while [7] found that DDPMs can efficiently generate audio using a small number of sampling steps, it has yet to be shown that the same is true for images.
In this paper, we show that DDPMs can achieve log-likelihoods competitive with other likelihood-based models, even on high-diversity datasets like ImageNet. To more tightly optimise the variational lower-bound (VLB), we learn the reverse process variances using a simple reparameterization and a hybrid learning objective that combines the VLB with the simplified objective from [2].
We find surprisingly that, with our hybrid objective, our models obtain better log-likelihoods than those obtained by optimizing the log-likelihood directly, and discover that the latter objective has much more gradient noise during training. We show that a simple importance sampling technique reduces this noise and allows us to achieve better log-likelihoods than with the hybrid objective.
After incorporating learned variances into our model, we surprisingly discovered that we could sample in fewer steps from our models with very little change in sample quality. While DDPM ([2]) requires hundreds of forward passes to produce good samples, we can achieve good samples with as few as 50 forward passes, thus speeding up sampling for use in practical applications. In parallel to our work, [13] develops a different approach to fast sampling, and we compare against their approach, DDIM, in our experiments.
While likelihood is a good metric to compare against other likelihood-based models, we also wanted to compare the distribution coverage of these models with GANs. We use the improved precision and recall metrics ([14]) and discover that diffusion models achieve much higher recall for similar FID, suggesting that they do indeed cover a much larger portion of the target distribution.
Finally, since we expect machine learning models to consume more computational resources in the future, we evaluate the performance of these models as we increase model size and training compute. Similar to [15], we observe trends that suggest predictable improvements in performance as we increase training compute.
2. Denoising Diffusion Probabilistic Models
Section Summary: Denoising Diffusion Probabilistic Models, or DDPMs, work by starting with real data like images and gradually adding small amounts of random noise over many steps until the result looks like pure static, essentially erasing the original content. To generate new data, a neural network is trained to reverse this process, learning to predict and remove the noise step by step, beginning from random noise to recreate something resembling the original training data. In practice, training simplifies this by randomly picking noise levels and focusing the model on accurately guessing the added noise, which leads to high-quality generated samples without needing to learn every detail of the process.
We briefly review the formulation of DDPMs from [2]. This formulation makes various simplifying assumptions, such as a fixed noising process $q$ which adds diagonal Gaussian noise at each timestep. For a more general derivation, see [1].
2.1 Definitions
Given a data distribution $x_0 \sim q(x_0)$, we define a forward noising process $q$ which produces latents $x_1$ through $x_T$ by adding Gaussian noise at time $t$ with variance $\beta_t \in (0, 1)$ as follows:
$ \begin{alignat}{2} q(x_1, ..., x_T | x_0) &\coloneqq \prod_{t=1}^{T} q(x_t | x_{t-1}) \tag{a} \ q(x_t | x_{t-1}) &\coloneqq \mathcal{N}(x_t; \sqrt{1-\beta_t} x_{t-1}, \beta_t \mathbf{I}) \tag{b} \end{alignat}\tag{1} $
Given sufficiently large $T$ and a well behaved schedule of $\beta_t$, the latent $x_T$ is nearly an isotropic Gaussian distribution. Thus, if we know the exact reverse distribution $q(x_{t-1}|x_t)$, we can sample $x_T \sim \mathcal{N}(0, \mathbf{I})$ and run the process in reverse to get a sample from $q(x_0)$. However, since $q(x_{t-1}|x_t)$ depends on the entire data distribution, we approximate it using a neural network as follows:
$ p_{\theta}(x_{t-1}|x_t) \coloneqq \mathcal{N}(x_{t-1}; \mu_{\theta}(x_t, t), \Sigma_{\theta}(x_t, t))\tag{2} $
The combination of $q$ and $p$ is a variational auto-encoder ([10]), and we can write the variational lower bound (VLB) as follows:
$ \begin{alignat}{2} L_{\text{vlb}} &\coloneqq L_0 + L_1 + ... + L_{T-1} + L_T \tag{a} \ L_{0} &\coloneqq -\log p_{\theta}(x_0 | x_1) \tag{b} \ L_{t-1} &\coloneqq {D_{KL}(q(x_{t-1}|x_t, x_0) \parallel p_{\theta}(x_{t-1}|x_t))} \tag{c} \ L_{T} &\coloneqq D_{KL}(q(x_T | x_0) \parallel p(x_T)) \tag{d} \end{alignat}\tag{3} $
Aside from $L_0$, each term of Equation 3a is a $KL$ divergence between two Gaussians, and can thus be evaluated in closed form. To evaluate $L_0$ for images, we assume that each color component is divided into 256 bins, and we compute the probability of $p_{\theta}(x_0 | x_1)$ landing in the correct bin (which is tractable using the CDF of the Gaussian distribution). Also note that while $L_T$ does not depend on $\theta$, it will be close to zero if the forward noising process adequately destroys the data distribution so that $q(x_T|x_0) \approx \mathcal{N}(0, \mathbf{I})$.
As noted in [2], the noising process defined in Equation 1b allows us to sample an arbitrary step of the noised latents directly conditioned on the input $x_0$. With $\alpha_t \coloneqq 1 - \beta_t$ and $\bar{\alpha}t \coloneqq \prod{s=0}^{t} \alpha_s$, we can write the marginal
$ \begin{alignat}{2} q(x_t|x_0) &= \mathcal{N}(x_t; \sqrt{\bar{\alpha}_t} x_0, (1-\bar{\alpha}_t) \mathbf{I}) \tag{a} \ x_t &= \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \epsilon \tag{b} \end{alignat}\tag{4} $
where $\epsilon \sim \mathcal{N}(0, \mathbf{I})$. Here, $1 - \bar{\alpha}_t$ tells us the variance of the noise for an arbitrary timestep, and we could equivalently use this to define the noise schedule instead of $\beta_t$.
Using Bayes theorem, one can calculate the posterior $q(x_{t-1}|x_t, x_0)$ in terms of $\tilde{\beta}_t$ and $\tilde{\mu}_t(x_t, x_0)$ which are defined as follows:
$ \begin{alignat}{2} \tilde{\beta}t &\coloneqq \frac{1-\bar{\alpha}{t-1}}{1-\bar{\alpha}t} \beta_t \tag{a} \ \tilde{\mu}t(x_t, x_0) &\coloneqq \frac{\sqrt{\bar{\alpha}{t-1}}\beta_t}{1-\bar{\alpha}t}x_0 + \frac{\sqrt{\alpha_t}(1-\bar{\alpha}{t-1})}{1-\bar{\alpha}t} x_t \tag{b} \ q(x{t-1}|x_t, x_0) &= \mathcal{N}(x{t-1}; \tilde{\mu}(x_t, x_0), \tilde{\beta}_t \mathbf{I}) \tag{c} \end{alignat}\tag{5} $
2.2 Training in Practice
The objective in Equation 3a is a sum of independent terms $L_{t-1}$, and 4b provides an efficient way to sample from an arbitrary step of the forward noising process and estimate $L_{t-1}$ using the posterior Equation (5c) and prior Equation (2). We can thus randomly sample $t$ and use the expectation $E_{t, x_0, \epsilon}[L_{t-1}]$ to estimate $L_{\text{vlb}}$. [2] uniformly sample $t$ for each image in each mini-batch.
There are many different ways to parameterize $\mu_{\theta}(x_t, t)$ in the prior. The most obvious option is to predict $\mu_{\theta}(x_t, t)$ directly with a neural network. Alternatively, the network could predict $x_0$, and this output could be used in Equation 5b to produce $\mu_{\theta}(x_t, t)$. The network could also predict the noise $\epsilon$ and use Equations 4b and 5b to derive
$ \mu_{\theta}(x_t, t) = \frac{1}{\sqrt{\alpha_t}} \left(x_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}t}} \epsilon{\theta}(x_t, t) \right) $
[2] found that predicting $\epsilon$ worked best, especially when combined with a reweighted loss function:
$ L_{\text{simple}} = E_{t, x_0, \epsilon}\left[|| \epsilon - \epsilon_{\theta}(x_t, t) ||^2 \right] $
This objective can be seen as a reweighted form of $L_{\text{vlb}}$ (without the terms affecting $\Sigma_{\theta}$). The authors found that optimizing this reweighted objective resulted in much better sample quality than optimizing $L_{\text{vlb}}$ directly, and explain this by drawing a connection to generative score matching ([3, 4]).
One subtlety is that $L_{\text{simple}}$ provides no learning signal for $\Sigma_{\theta}(x_t, t)$. This is irrelevant, however, since [2] achieved their best results by fixing the variance to $\sigma_t^2 \mathbf{I}$ rather than learning it. They found that they achieve similar sample quality using either $\sigma_t^2 = \beta_t$ or $\sigma_t^2 = \tilde{\beta}_t$, which are the upper and lower bounds on the variance given by $q(x_0)$ being either isotropic Gaussian noise or a delta function, respectively.
3. Improving the Log-likelihood
Section Summary: Denoising diffusion probabilistic models can create high-quality images but struggle with log-likelihood, a key measure of how well they capture the full variety of data patterns, potentially indicating flaws like missing details in the generated outputs. To address this, researchers tested changes such as increasing the number of diffusion steps from 1,000 to 4,000 and learning the model's variance through a smart interpolation in the log domain, combined with a hybrid training objective that balances simplicity and accuracy. These tweaks significantly boosted log-likelihood scores on datasets like ImageNet at 64x64 pixels and CIFAR-10, showing that diffusion models can match the strengths of other generative techniques when properly tuned.
While [2] found that DDPMs can generate high-fidelity samples according to FID ([16]) and Inception Score ([17]), they were unable to achieve competitive log-likelihoods with these models. Log-likelihood is a widely used metric in generative modeling, and it is generally believed that optimizing log-likelihood forces generative models to capture all of the modes of the data distribution ([18]). Additionally, recent work ([15]) has shown that small improvements in log-likelihood can have a dramatic impact on sample quality and learnt feature representations. Thus, it is important to explore why DDPMs seem to perform poorly on this metric, since this may suggest a fundamental shortcoming such as bad mode coverage. This section explores several modifications to the algorithm described in Section 2 that, when combined, allow DDPMs to achieve much better log-likelihoods on image datasets, suggesting that these models enjoy the same benefits as other likelihood-based generative models.
To study the effects of different modifications, we train fixed model architectures with fixed hyperparameters on the ImageNet $64 \times 64$ ([19]) and CIFAR-10 ([11]) datasets. While CIFAR-10 has seen more usage for this class of models, we chose to study ImageNet $64 \times 64$ as well because it provides a good trade-off between diversity and resolution, allowing us to train models quickly without worrying about overfitting. Additionally, ImageNet $64 \times 64$ has been studied extensively in the context of generative modeling ([9, 20, 21, 22]), allowing us to compare DDPMs directly to many other generative models.
The setup from [2] (optimizing $L_{\text{simple}}$ while setting $\sigma_t^2 = \beta_t$ and $T = 1000$) achieves a log-likelihood of 3.99 (bits/dim) on ImageNet $64 \times 64$ after 200K training iterations. We found in early experiments that we could get a boost in log-likelihood by increasing $T$ from 1000 to 4000; with this change, the log-likelihood improves to 3.77. For the remainder of this section, we use $T = 4000$, but we explore this choice in Section 4.
3.1 Learning $\Sigma_{\theta}(x_t, t)$
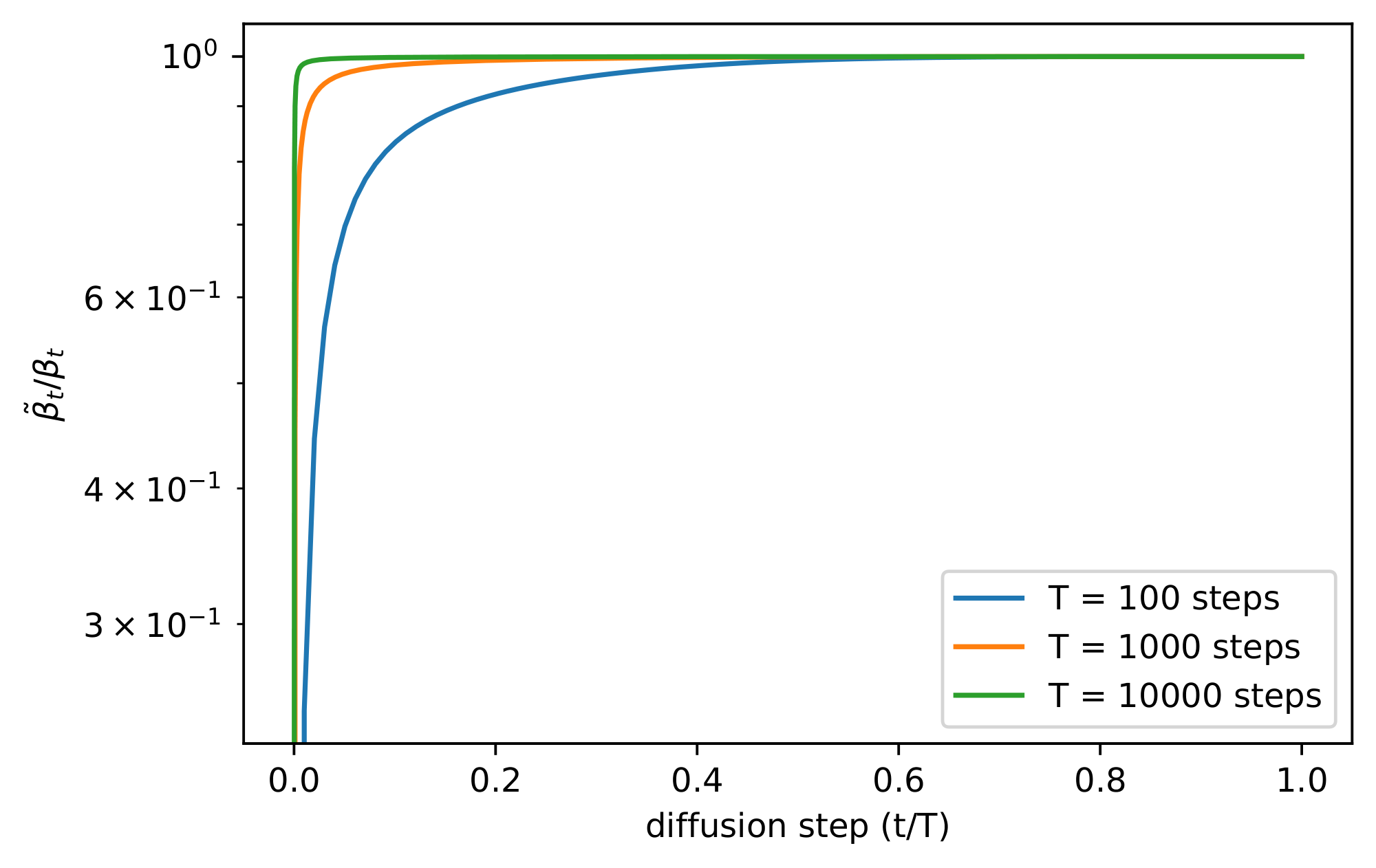
In [2], the authors set $\Sigma_{\theta}(x_t, t) = \sigma^2_t \mathbf{I}$, where $\sigma_t$ is not learned. Oddly, they found that fixing $\sigma^2_t$ to $\beta_t$ yielded roughly the same sample quality as fixing it to $\tilde{\beta}_t$. Considering that $\beta_t$ and $\tilde{\beta}_t$ represent two opposite extremes, it is reasonable to ask why this choice doesn't affect samples. One clue is given by Figure 1, which shows that $\beta_t$ and $\tilde{\beta}t$ are almost equal except near $t = 0$, i.e. where the model is dealing with imperceptible details. Furthermore, as we increase the number of diffusion steps, $\beta_t$ and $\tilde{\beta}t$ seem to remain close to one another for more of the diffusion process. This suggests that, in the limit of infinite diffusion steps, the choice of $\sigma_t$ might not matter at all for sample quality. In other words, as we add more diffusion steps, the model mean $\mu{\theta}(x_t, t)$ determines the distribution much more than $\Sigma{\theta}(x_t, t)$.
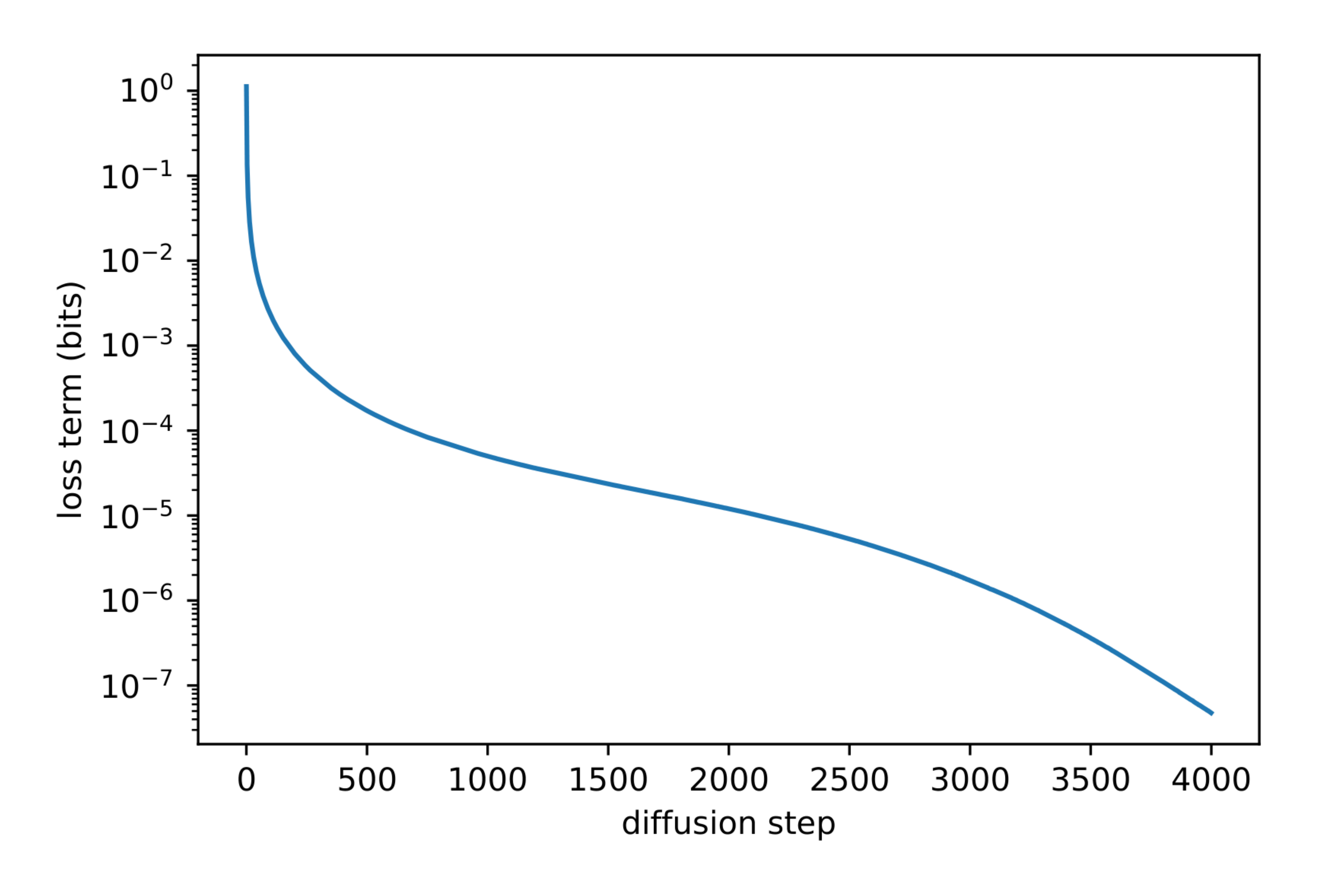
While the above argument suggests that fixing $\sigma_t$ is a reasonable choice for the sake of sample quality, it says nothing about log-likelihood. In fact, Figure 2 shows that the first few steps of the diffusion process contribute the most to the variational lower bound. Thus, it seems likely that we could improve log-likelihood by using a better choice of $\Sigma_{\theta}(x_t, t)$. To achieve this, we must learn $\Sigma_{\theta}(x_t, t)$ without the instabilities encountered by [2].
Since Figure 1 shows that the reasonable range for $\Sigma_{\theta}(x_t, t)$ is very small, it would be hard for a neural network to predict $\Sigma_{\theta}(x_t, t)$ directly, even in the log domain, as observed by [2]. Instead, we found it better to parameterize the variance as an interpolation between $\beta_t$ and $\tilde{\beta}_t$ in the log domain. In particular, our model outputs a vector $v$ containing one component per dimension, and we turn this output into variances as follows:
$ \Sigma_{\theta}(x_t, t) = \exp(v \log \beta_t + (1-v) \log \tilde{\beta}_t) $
We did not apply any constraints on $v$, theoretically allowing the model to predict variances outside of the interpolated range. However, we did not observe the network doing this in practice, suggesting that the bounds for $\Sigma_{\theta}(x_t, t)$ are indeed expressive enough.
Since $L_{\text{simple}}$ doesn't depend on $\Sigma_{\theta}(x_t, t)$, we define a new hybrid objective:
$ L_{\text{hybrid}} = L_{\text{simple}} + \lambda L_{\text{vlb}} $
For our experiments, we set $\lambda = 0.001$ to prevent $L_{\text{vlb}}$ from overwhelming $L_{\text{simple}}$. Along this same line of reasoning, we also apply a stop-gradient to the $\mu_{\theta}(x_t, t)$ output for the $L_{\text{vlb}}$ term. This way, $L_{\text{vlb}}$ can guide $\Sigma_{\theta}(x_t, t)$ while $L_{\text{simple}}$ is still the main source of influence over $\mu_{\theta}(x_t, t)$.
3.2 Improving the Noise Schedule

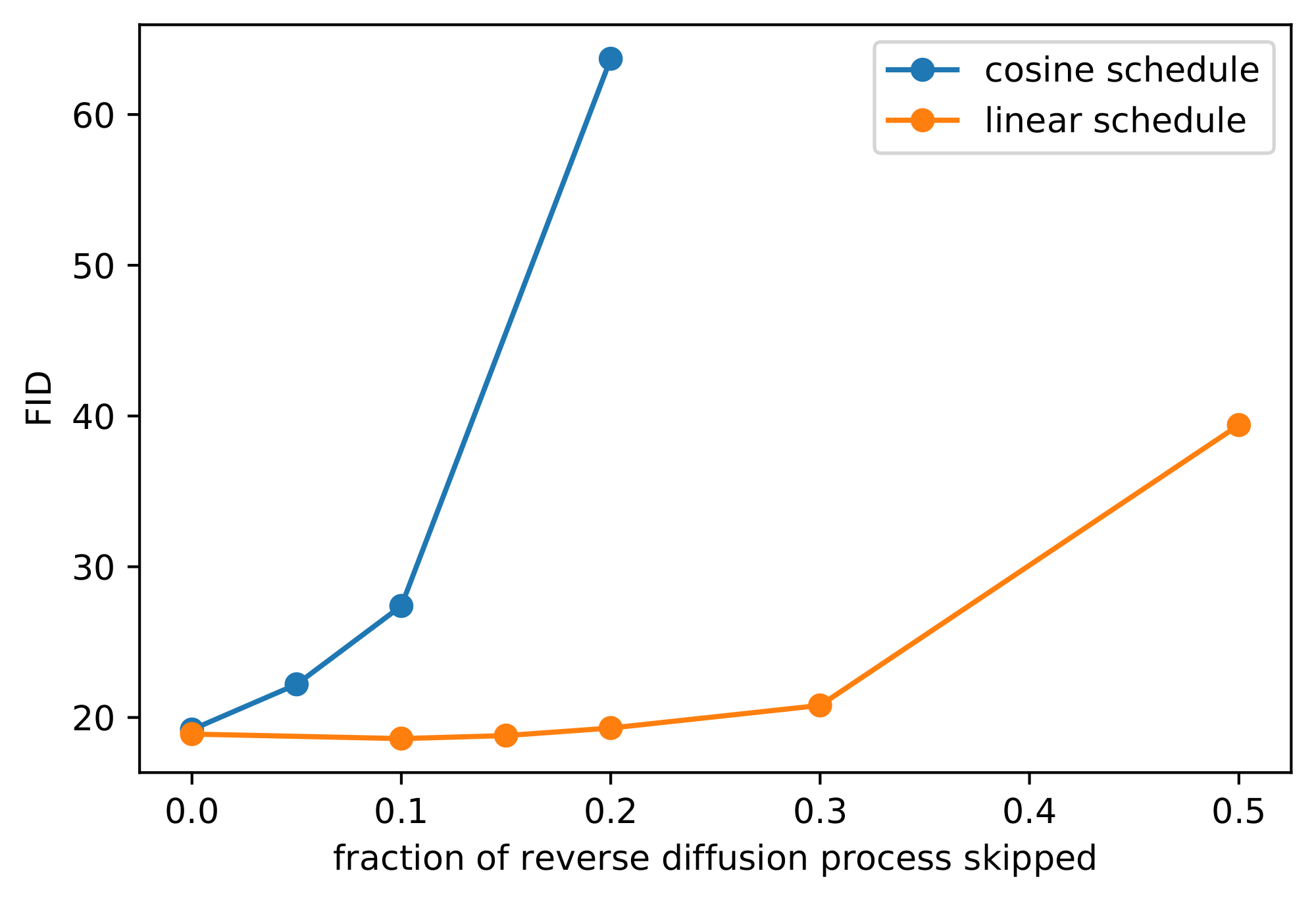
We found that while the linear noise schedule used in [2] worked well for high resolution images, it was sub-optimal for images of resolution $64 \times 64$ and $32 \times 32$. In particular, the end of the forward noising process is too noisy, and so doesn't contribute very much to sample quality. This can be seen visually in Figure 3. The result of this effect is studied in Figure 4, where we see that a model trained with the linear schedule does not get much worse (as measured by FID) when we skip up to 20% of the reverse diffusion process.
To address this problem, we construct a different noise schedule in terms of $\bar{\alpha}_t$:
$ \begin{align} \bar{\alpha}_t = \frac{f(t)}{f(0)}, ;; f(t) = \cos\left(\frac{t/T + s}{1+s}\cdot\frac{\pi}{2}\right)^2 \end{align} $
To go from this definition to variances $\beta_t$, we note that $\beta_t = 1 - \frac{\bar{\alpha}t}{\bar{\alpha}{t-1}}$. In practice, we clip $\beta_t$ to be no larger than 0.999 to prevent singularities at the end of the diffusion process near $t=T$.
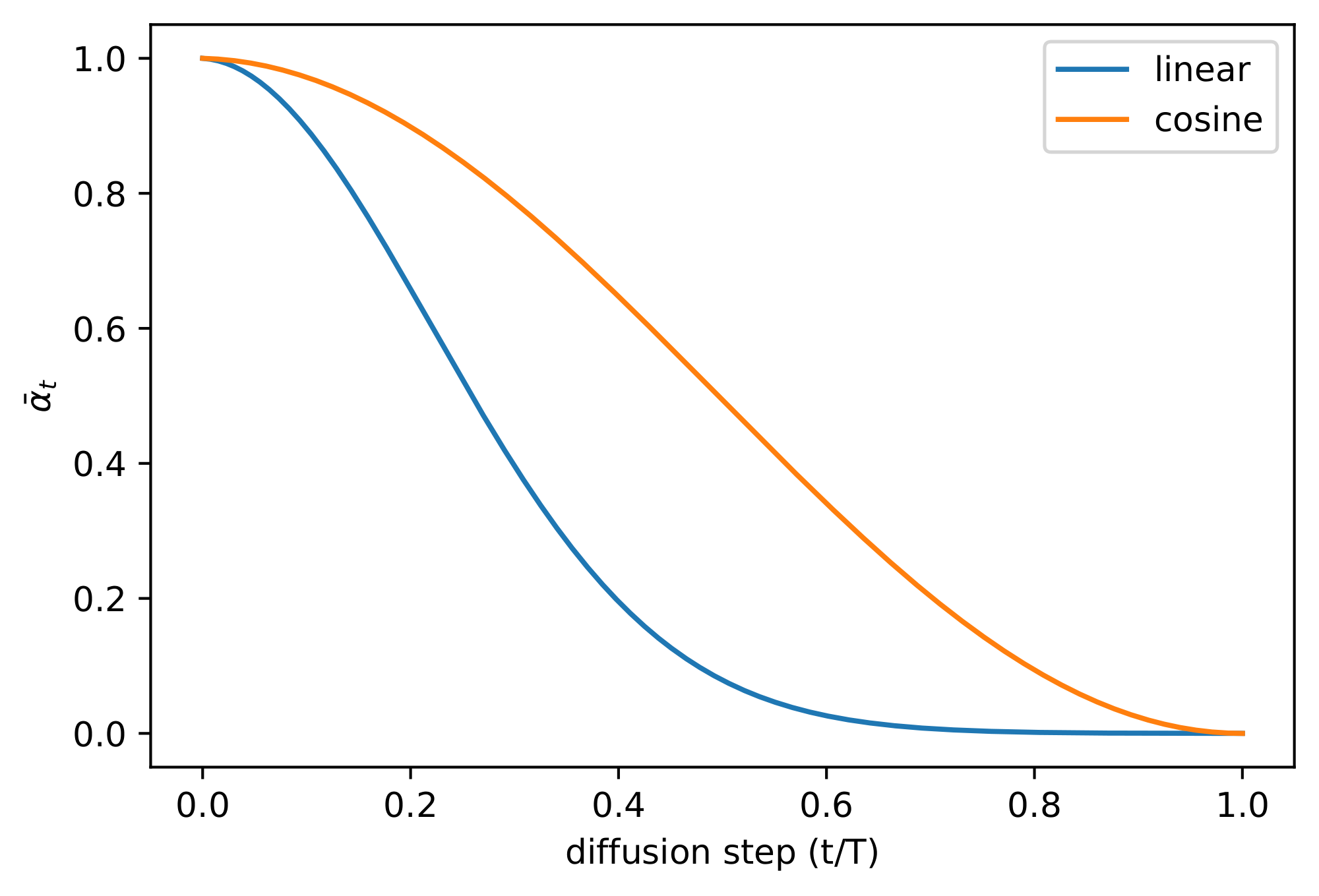
Our cosine schedule is designed to have a linear drop-off of $\bar{\alpha}_t$ in the middle of the process, while changing very little near the extremes of $t=0$ and $t=T$ to prevent abrupt changes in noise level. Figure 5 shows how $\bar{\alpha}_t$ progresses for both schedules. We can see that the linear schedule from [2] falls towards zero much faster, destroying information more quickly than necessary.
We use a small offset $s$ to prevent $\beta_t$ from being too small near $t=0$, since we found that having tiny amounts of noise at the beginning of the process made it hard for the network to predict $\epsilon$ accurately enough. In particular, we selected $s$ such that $\sqrt{\beta_0}$ was slightly smaller than the pixel bin size $1/127.5$, which gives $s=0.008$. We chose to use $cos^2$ in particular because it is a common mathematical function with the shape we were looking for. This choice was arbitrary, and we expect that many other functions with similar shapes would work as well.
3.3 Reducing Gradient Noise
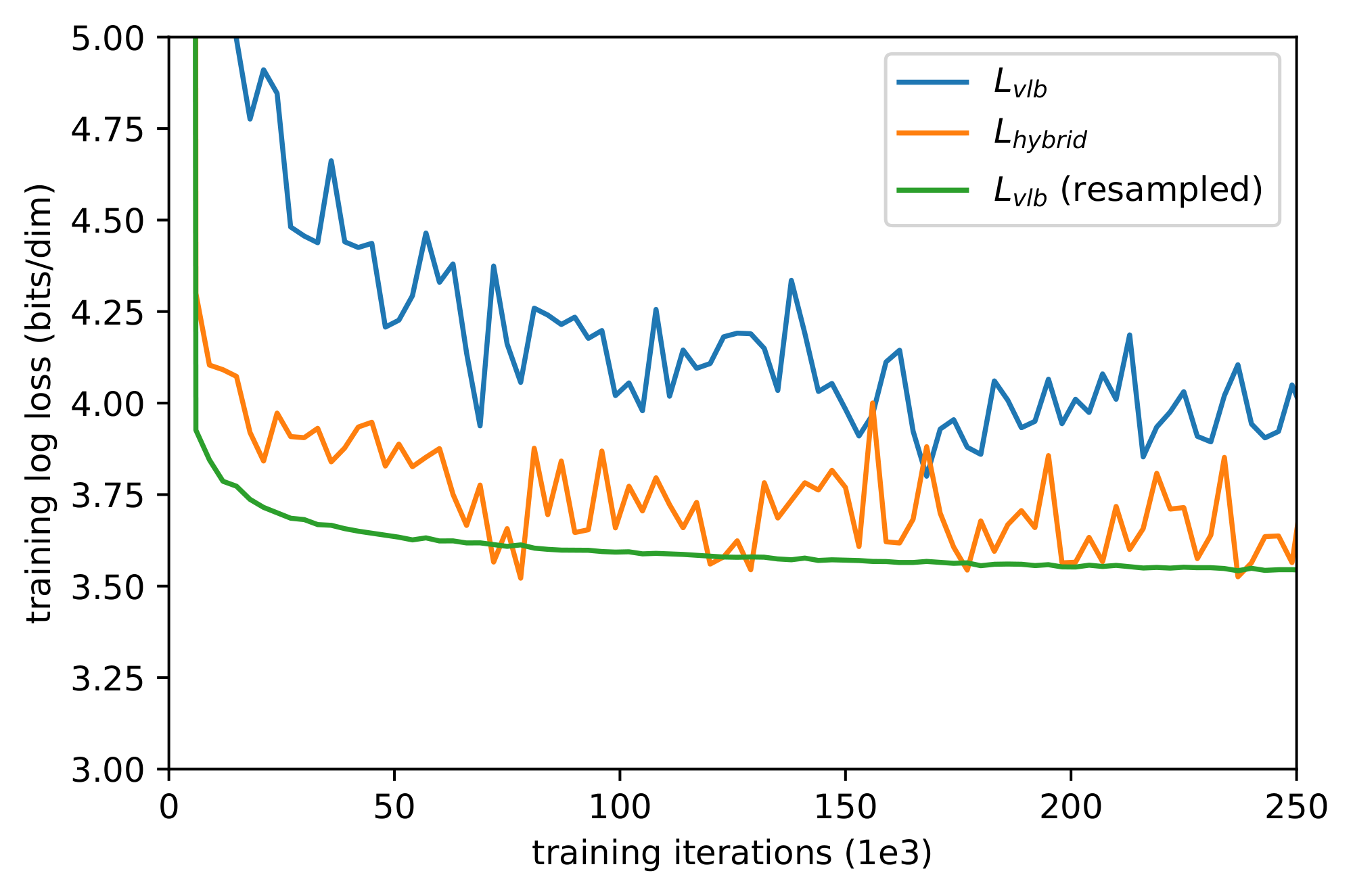
We expected to achieve the best log-likelihoods by optimizing $L_{\text{vlb}}$ directly, rather than by optimizing $L_{\text{hybrid}}$. However, we were surprised to find that $L_{\text{vlb}}$ was actually quite difficult to optimize in practice, at least on the diverse ImageNet $64 \times 64$ dataset. Figure 6 shows the learning curves for both $L_{\text{vlb}}$ and $L_{\text{hybrid}}$. Both curves are noisy, but the hybrid objective clearly achieves better log-likelihoods on the training set given the same amount of training time.
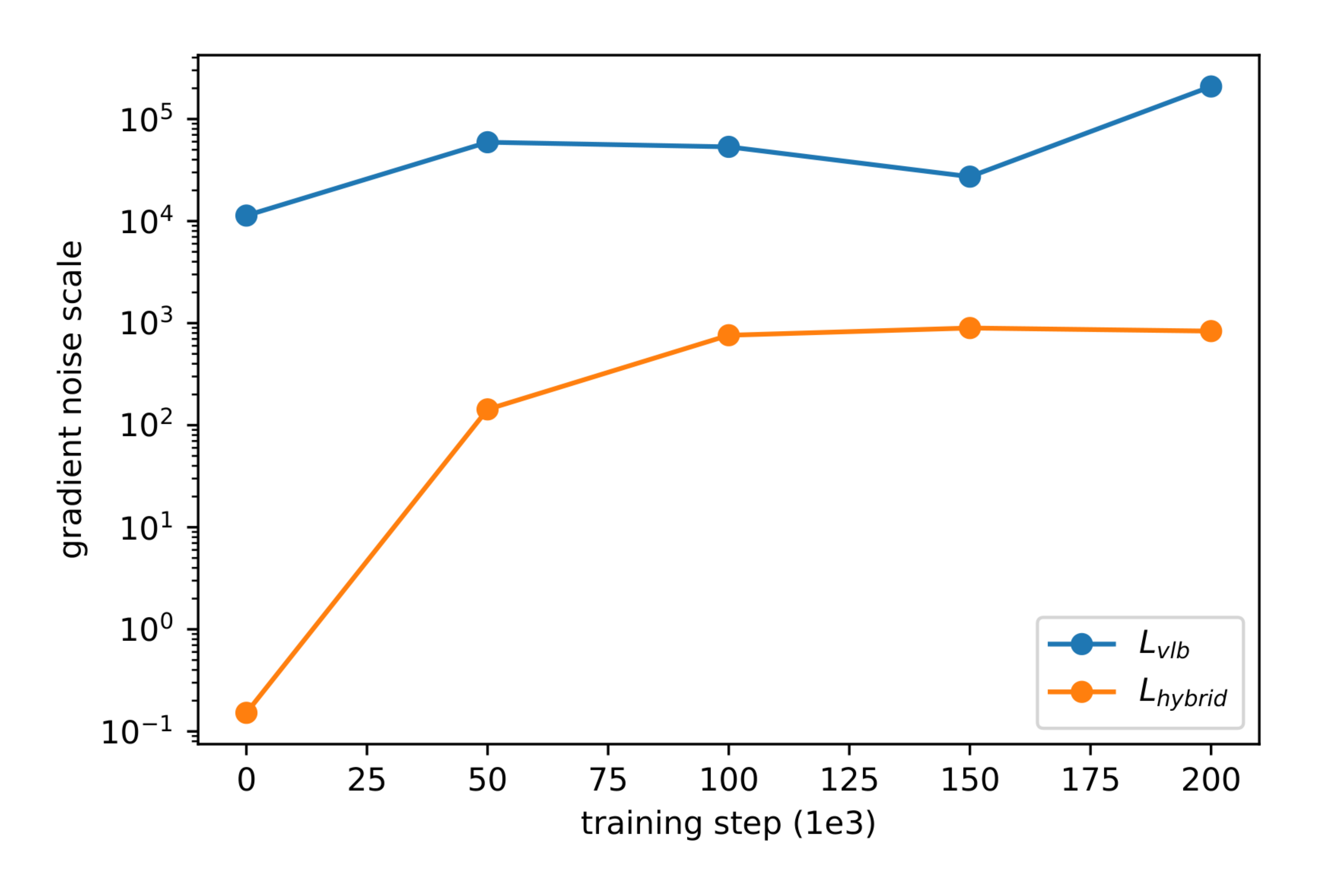
We hypothesized that the gradient of $L_{\text{vlb}}$ was much noisier than that of $L_{\text{hybrid}}$. We confirmed this by evaluating the gradient noise scales ([23]) for models trained with both objectives, as shown in Figure 7. Thus, we sought out a way to reduce the variance of $L_{\text{vlb}}$ in order to optimize directly for log-likelihood.
Noting that different terms of $L_{\text{vlb}}$ have greatly different magnitudes (Figure 2), we hypothesized that sampling $t$ uniformly causes unnecessary noise in the $L_{\text{vlb}}$ objective. To address this, we employ importance sampling:
$ L_{\text{vlb}} = E_{t \sim p_t}\left[\frac{L_t}{p_t}\right]\text{, where } p_t \propto \sqrt{E[L_t^2]}\text{ and }\sum p_t = 1 $
Since $E[L_t^2]$ is unknown beforehand and may change throughout training, we maintain a history of the previous 10 values for each loss term, and update this dynamically during training. At the beginning of training, we sample $t$ uniformly until we draw 10 samples for every $t \in [0, T-1]$.
With this importance sampled objective, we are able to achieve our best log-likelihoods by optimizing $L_{\text{vlb}}$. This can be seen in Figure 6 as the $L_{\text{vlb}}$ (resampled) curve. The figure also shows that the importance sampled objective is considerably less noisy than the original, uniformly sampled objective. We found that the importance sampling technique was not helpful when optimizing the less-noisy $L_{\text{hybrid}}$ objective directly.
3.4 Results and Ablations
In this section, we ablate the changes we have made to achieve better log-likelihoods. Table 1 summarizes the results of our ablations on ImageNet $64 \times 64$, and Table 2 shows them for CIFAR-10. We also trained our best ImageNet $64 \times 64$ models for 1.5M iterations, and report these results as well. $L_{\text{vlb}}$ and $L_{\text{hybrid}}$ were trained with learned sigmas using the parameterization from Section 3.1. For $L_{\text{vlb}}$, we used the resampling scheme from Section 3.3.
Based on our ablations, using $L_{\text{hybrid}}$ and our cosine schedule improves log-likelihood while keeping similar FID as the baseline from [2]. Optimizing $L_{\text{vlb}}$ further improves log-likelihood at the cost of a higher FID. We generally prefer to use $L_{\text{hybrid}}$ over $L_{\text{vlb}}$ as it gives a boost in likelihood without sacrificing sample quality.
In Table 3 we compare our best likelihood models against prior work, showing that these models are competitive with the best conventional methods in terms of log-likelihood.
\begin{tabular}{ccccll}
\toprule
Iters & $T$ & Schedule & Objective & NLL & FID \\
\midrule
200K & 1K & linear & $L_{\text{simple}}$ & 3.99 & 32.5 \\
200K & 4K & linear & $L_{\text{simple}}$ & 3.77 & 31.3 \\
\midrule
200K & 4K & linear & $L_{\text{hybrid}}$ & 3.66 & 32.2 \\
200K & 4K & cosine & $L_{\text{simple}}$ & 3.68 & \bf 27.0 \\
200K & 4K & cosine & $L_{\text{hybrid}}$ & 3.62 & 28.0 \\
200K & 4K & cosine & $L_{\text{vlb}}$ & \bf 3.57 & 56.7 \\
\midrule
1.5M & 4K & cosine & $L_{\text{hybrid}}$ & 3.57 & \bf 19.2 \\
1.5M & 4K & cosine & $L_{\text{vlb}}$ & \bf 3.53 & 40.1 \\
\bottomrule
\end{tabular}
\begin{tabular}{ccccll}
\toprule
Iters & $T$ & Schedule & Objective & NLL & FID \\
\midrule
500K & 1K & linear & $L_{\text{simple}}$ & 3.73 & 3.29 \\
500K & 4K & linear & $L_{\text{simple}}$ & 3.37 & \bf 2.90 \\
\midrule
500K & 4K & linear & $L_{\text{hybrid}}$ & 3.26 & 3.07 \\
500K & 4K & cosine & $L_{\text{simple}}$ & 3.26 & 3.05 \\
500K & 4K & cosine & $L_{\text{hybrid}}$ & 3.17 & 3.19 \\
500K & 4K & cosine & $L_{\text{vlb}}$ & \bf 2.94 & 11.47 \\
\bottomrule
\end{tabular}
\begin{tabular}{lcc}
\toprule
Model & ImageNet & CIFAR \\
\midrule
Glow ([24]) & 3.81 & 3.35 \\
Flow++ ([25]) & 3.69 & 3.08 \\
PixelCNN ([9]) & 3.57 & 3.14 \\
SPN ([20]) & 3.52 & - \\
NVAE ([26]) & - & 2.91 \\
Very Deep VAE ([27]) & 3.52 & 2.87 \\
PixelSNAIL ([28]) & 3.52 & 2.85 \\
Image Transformer ([29]) & 3.48 & 2.90 \\
Sparse Transformer ([21]) & 3.44 & \bf 2.80 \\
Routing Transformer ([22]) & \bf 3.43 & - \\
\midrule
DDPM ([2]) & 3.77 & 3.70 \\
DDPM (cont flow) ([30]) & - & 2.99 \\
Improved DDPM (ours) & \bf 3.53 & \bf 2.94 \\
\bottomrule
\end{tabular}
4. Improving Sampling Speed
Section Summary: The section discusses how diffusion models, which normally take several minutes to generate a single image due to their 4000 training steps, can be sped up dramatically by using fewer steps during the sampling process without retraining. Researchers found that by selecting a shorter sequence of evenly spaced time steps from the original schedule and adjusting the noise levels accordingly, their advanced hybrid model produces high-quality images in just seconds, often with as few as 100 steps yielding near-perfect results on datasets like CIFAR-10 and ImageNet. In contrast, simpler models lose quality more quickly with reductions, and while a competing method called DDIM excels at very low step counts, the hybrid approach outperforms it for moderate speeds.
All of our models were trained with 4000 diffusion steps, and thus producing a single sample takes several minutes on a modern GPU. In this section, we explore how performance scales if we reduce the steps used during sampling, and find that our pre-trained $L_{\text{hybrid}}$ models can produce high-quality samples with many fewer diffusion steps than they were trained with (without any fine-tuning). Reducing the steps in this way makes it possible to sample from our models in a number of seconds rather than minutes, and greatly improves the practical applicability of image DDPMs.
For a model trained with $T$ diffusion steps, we would typically sample using the same sequence of $t$ values $(1, 2, ..., T)$ as used during training. However, it is also possible to sample using an arbitrary subsequence $S$ of $t$ values. Given the training noise schedule $\bar{\alpha}t$, for a given sequence $S$ we can obtain the sampling noise schedule $\bar{\alpha}{S_t}$, which can be then used to obtain corresponding sampling variances
$ \beta_{S_{t}} = 1 - \frac{\bar{\alpha}{S_t}}{\bar{\alpha}{S_{t-1}}}, ;;;\tilde{\beta}{S_t} = \frac{1-\bar{\alpha}{S_{t-1}}}{1-\bar{\alpha}{S_t}} \beta{S_t} $
Now, since $\Sigma_{\theta}(x_{S_t}, S_t)$ is parameterized as a range between $\beta_{S_t}$ and $\tilde{\beta}{S_t}$, it will automatically be rescaled for the shorter diffusion process. We can thus compute $p(x{S_{t-1}}|x_{S_t})$ as $\mathcal{N}(\mu_{\theta}(x_{S_t}, S_t), \Sigma_{\theta}(x_{S_t}, S_t))$.
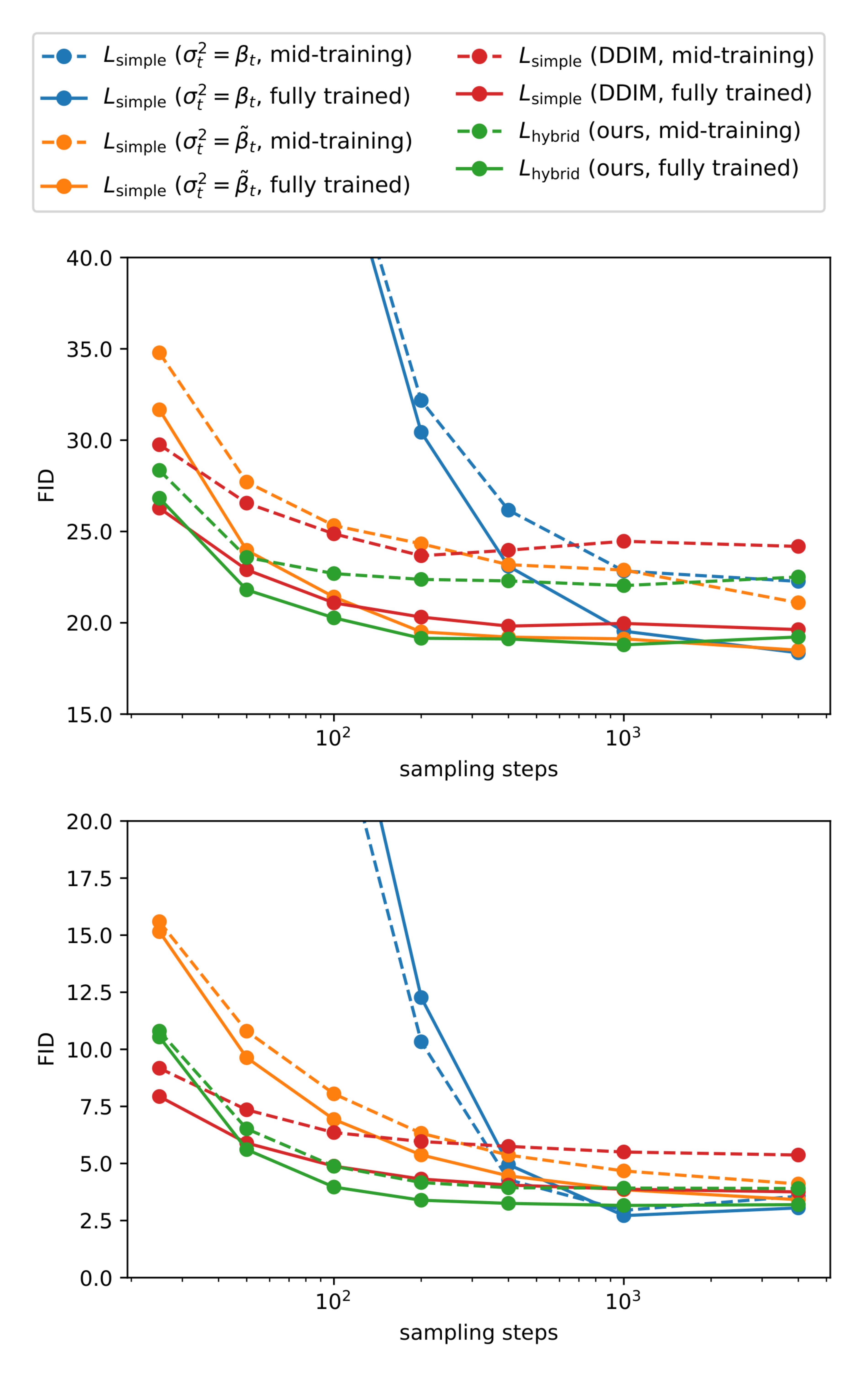
To reduce the number of sampling steps from $T$ to $K$, we use $K$ evenly spaced real numbers between 1 and $T$ (inclusive), and then round each resulting number to the nearest integer. In Figure 8, we evaluate FIDs for an $L_{\text{hybrid}}$ model and an $L_{\text{simple}}$ model that were trained with 4000 diffusion steps, using 25, 50, 100, 200, 400, 1000, and 4000 sampling steps. We do this for both a fully-trained checkpoint, and a checkpoint mid-way through training. For CIFAR-10 we used 200K and 500K training iterations, and for ImageNet-64 we used 500K and 1500K training iterations. We find that the $L_{\text{simple}}$ models with fixed sigmas (with both the larger $\sigma_t^2 = \beta_t$ and the smaller $\sigma_t^2 = \tilde{\beta}t$) suffer much more in sample quality when using a reduced number of sampling steps, whereas our $L{\text{hybrid}}$ model with learnt sigmas maintains high sample quality. With this model, 100 sampling steps is sufficient to achieve near-optimal FIDs for our fully trained models.
Parallel to our work, [13] propose a fast sampling algorithm for DDPMs by producing a new implicit model that has the same marginal noise distributions, but deterministically maps noise to images. We include their algorithm, DDIM, in Figure 8, finding that DDIM produces better samples with fewer than 50 sampling steps, but worse samples when using 50 or more steps. Interestingly, DDIM performs worse at the start of training, but closes the gap to other samplers as training continues. We found that our striding technique drastically reduced performance of DDIM, so our DDIM results instead use the constant striding[^1] from [13], wherein the final timestep is $T-T/K+1$ rather than $T$. The other samplers performed slightly better with our striding.
[^1]: We additionally tried the quadratic stride from [13], but found that it hurt sample quality when combined with our cosine schedule.
5. Comparison to GANs
Section Summary: This section compares improved diffusion models to GANs, like BigGAN-deep, on generating class-specific images from the ImageNet dataset at 64x64 resolution, using metrics such as FID for overall quality, precision for how realistic samples are, and recall for how well they cover the variety in the data. A larger diffusion model outperforms BigGAN-deep with the best FID score of 2.92 and strong recall at 0.71, showing it produces diverse samples across classes like birds and animals, while BigGAN excels more in precision but falls short on diversity. Overall, the results suggest diffusion models are superior at capturing the full range of possibilities in the image distribution compared to GANs.
Table 4: Sample quality comparison on class-conditional ImageNet $64 \times 64$. Precision and recall ([14]) are measured using Inception-V3 features and $K=5$. We trained BigGAN-deep for 125K iterations, and did not use truncation for sampling to maximize recall for the GAN.
| Model | FID | Prec. | Recall |
|---|---|---|---|
| BigGAN-deep ([31]) | 4.06 | 0.86 | 0.59 |
| Improved Diffusion (small) | 6.92 | 0.77 | 0.72 |
| Improved Diffusion (large) | 2.92 | 0.82 | 0.71 |

While likelihood is a good proxy for mode-coverage, it is difficult to compare to GANs with this metric. Instead, we turn to precision and recall ([14]). Since it is common in the GAN literature to train class-conditional models, we do the same for this experiment. To make our models class-conditional, we inject class information through the same pathway as the timestep $t$. In particular, we add a class embedding $v_i$ to the timestep embedding $e_t$, and pass this embedding to residual blocks throughout the model. We train using the $L_{\text{hybrid}}$ objective and use $250$ sampling steps. We train two models: a "small" model with 100M parameters for 1.7M training steps, and a larger model with 270 million parameters for 250K iterations. We train one BigGAN-deep model with 100M parameters across the generator and discriminator.
When computing metrics for this task, we generated 50K samples (rather than 10K) to be directly comparable to other works.[^2] This is the only ImageNet $64 \times 64$ FID we report that was computed using 50K samples. For FID, the reference distribution features were computed over the full training set, following [31].
[^2]: We found that using more samples led to a decrease in estimated FID of roughly 2 points.
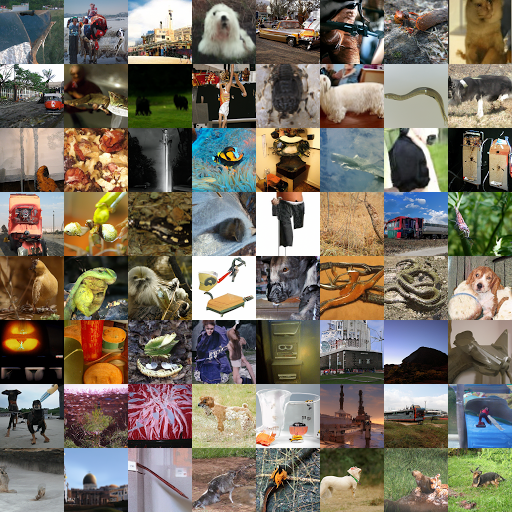
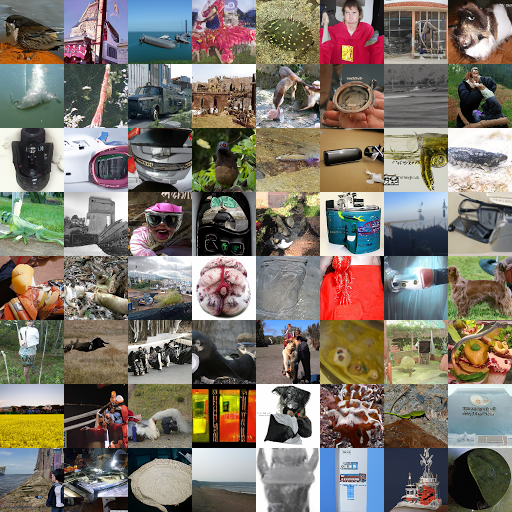
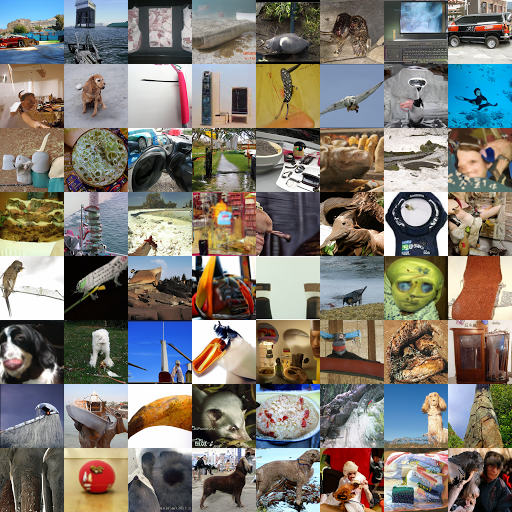
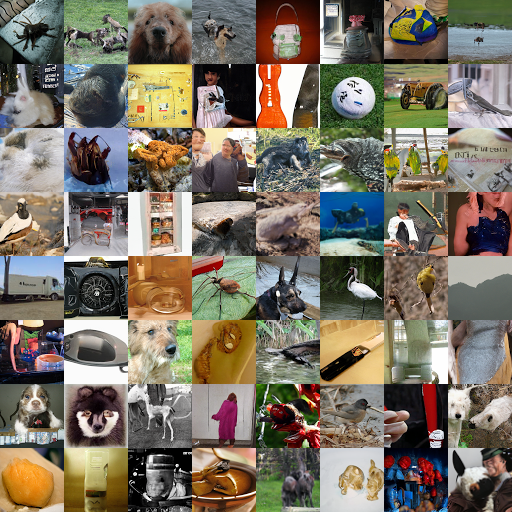
Figure 9 shows our samples from the larger model, and Table 4 summarizes our results. We find that BigGAN-deep outperforms our smaller model in terms of FID, but struggles in terms of recall. This suggests that diffusion models are better at covering the modes of the distribution than comparable GANs.
6. Scaling Model Size
Section Summary: Researchers explored how increasing model size and training time affects the performance of diffusion probabilistic models on generating 64x64 pixel images from the ImageNet dataset. They trained models with varying capacities by adjusting the number of channels in the layers, from 64 to 192, and found that a key quality measure called FID, which assesses how realistic the generated images look, improves steadily in a predictable pattern as compute increases. However, another measure, negative log-likelihood or NLL, which evaluates how well the model matches the true data distribution, does not scale as smoothly, possibly due to inherent limitations or overfitting.
In the previous sections, we showed algorithmic changes that improved log-likelihood and FID without changing the amount of training compute. However, a trend in modern machine learning is that larger models and more training time tend to improve model performance ([32, 33, 34]). Given this observation, we investigate how FID and NLL scale as a function of training compute. Our results, while preliminary, suggest that DDPMs improve in a predictable way as training compute increases.
To measure how performance scales with training compute, we train four different models on ImageNet $64 \times 64$ with the $L_{\text{hybrid}}$ objective described in Section 3.1. To change model capacity, we apply a depth multiplier across all layers, such that the first layer has either 64, 96, 128, or 192 channels. Note that our previous experiments used 128 channels in the first layer. Since the depth of each layer affects the scale of the initial weights, we scale the Adam ([35]) learning rate for each model by $1/\sqrt{\text{channel multiplier}}$, such that the 128 channel model has a learning rate of 0.0001 (as in our other experiments).
Figure 10 shows how FID and NLL improve relative to theoretical training compute.[^3] The FID curve looks approximately linear on a log-log plot, suggesting that FID scales according to a power law (plotted as the black dashed line). The NLL curve does not fit a power law as cleanly, suggesting that validation NLL scales in a less-favorable manner than FID. This could be caused by a variety of factors, such as 1) an unexpectedly high irreducible loss ([15]) for this type of diffusion model, or 2) the model overfitting to the training distribution. We also note that these models do not achieve optimal log-likelihoods in general because they were trained with our $L_{\text{hybrid}}$ objective and not directly with $L_{\text{vlb}}$ to keep both good log-likelihoods and sample quality.
[^3]: The x-axis assumes full hardware utilization
::::
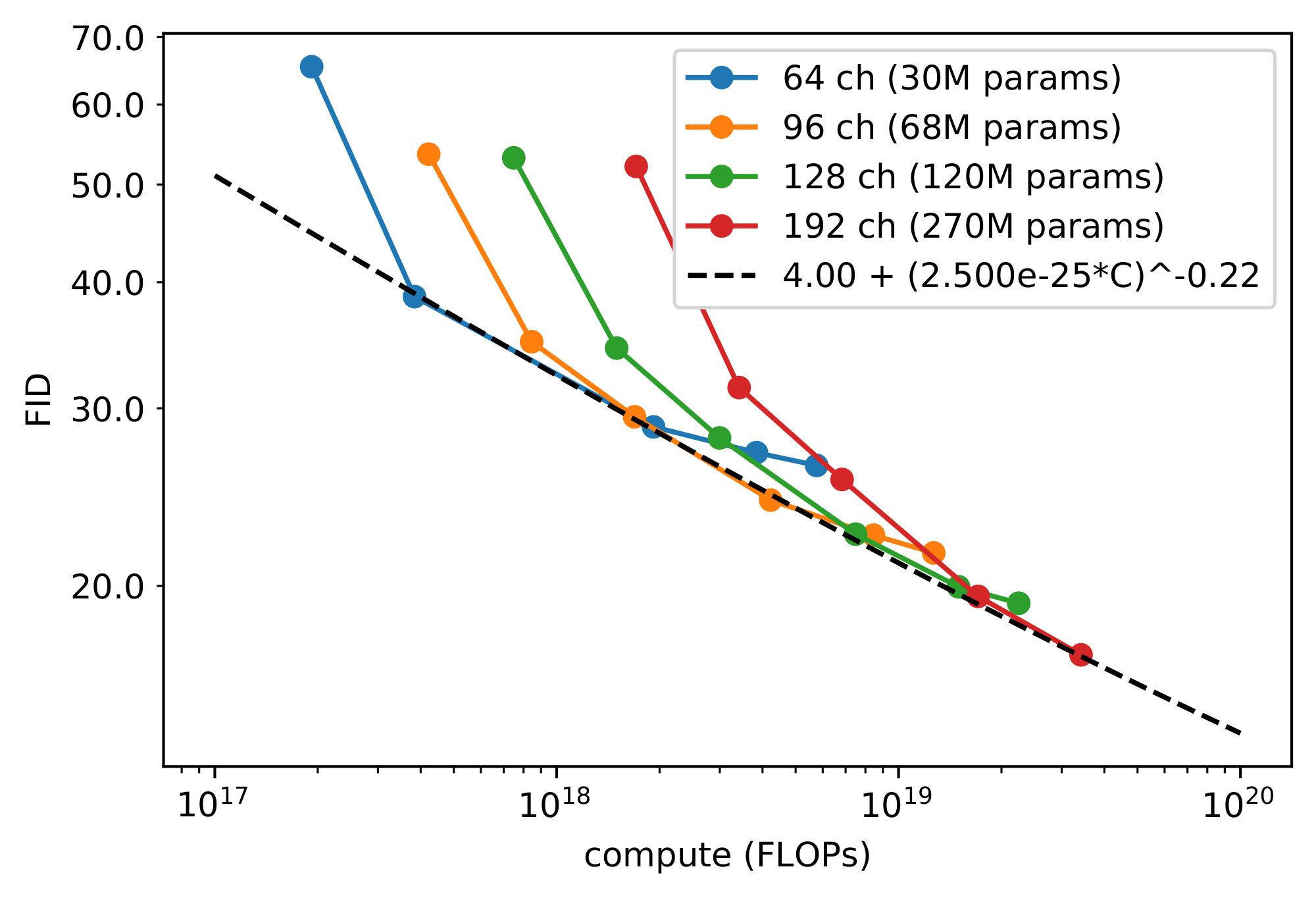
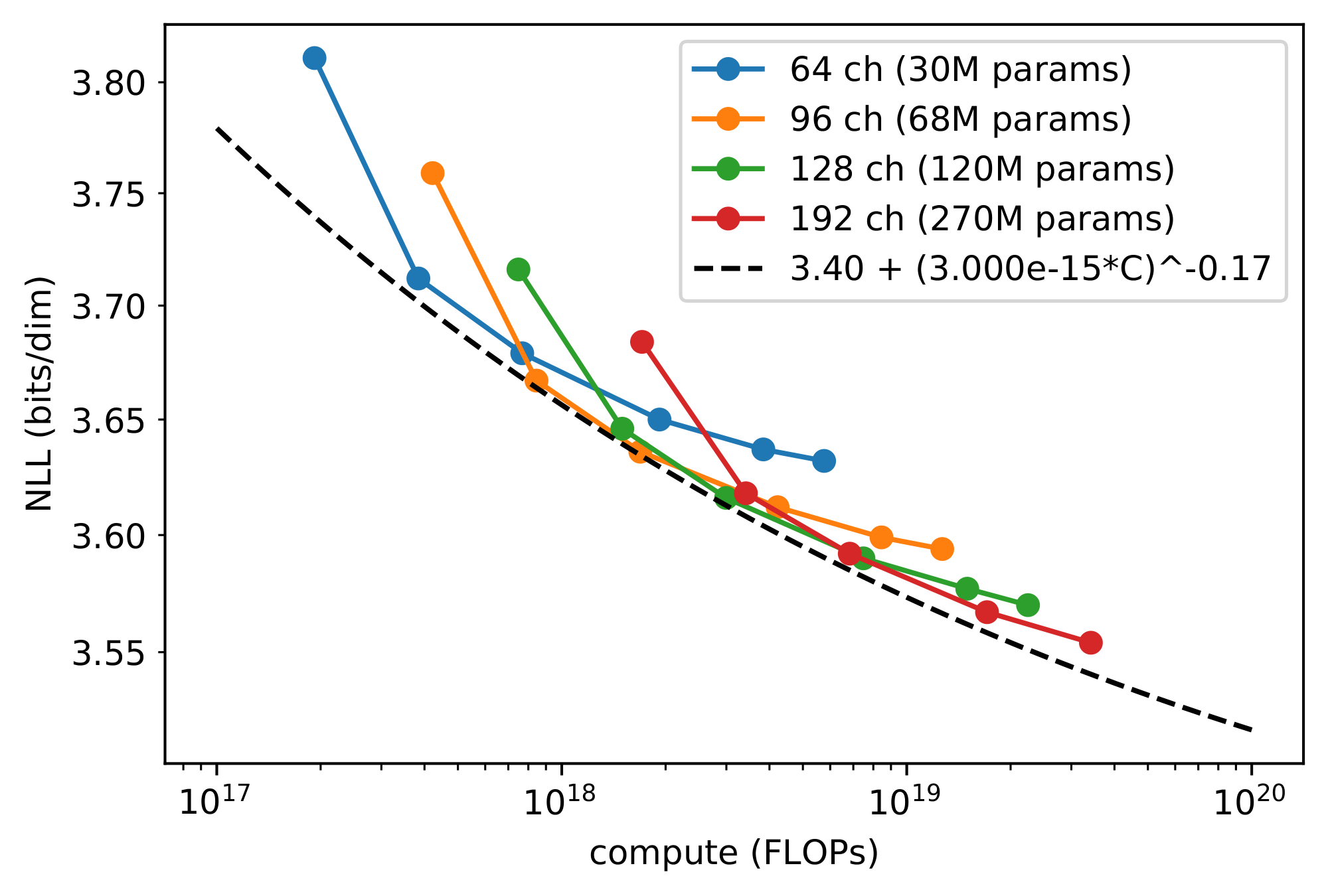
Figure 10: FID and validation NLL throughout training on ImageNet $64 \times 64$ for different model sizes. The constant for the FID trend line was approximated using the FID of in-distribution data. For the NLL trend line, the constant was approximated by rounding down the current state-of-the-art NLL ([22]) on this dataset. ::::
7. Related Work
Section Summary: Recent studies like [7] and [8] have applied diffusion probabilistic models, or DDPMs, to generate high-quality audio from visual sound representations called mel-spectrograms, with [7] improving the process to use fewer steps while maintaining quality, though their strong input guidance makes it simpler than the unconditional image generation in this work. Another paper, [6], tested score matching techniques for images and found that advanced network designs eliminated the need for extra adversarial training to get good results. Works such as [13] and [30], developed alongside this one, speed up sampling in DDPMs through alternative noise-handling methods that reduce steps but often require additional tweaks like tuned corrections for optimal output, while [36] explores energy-based models for the reverse diffusion process, potentially allowing even fewer steps for strong samples.
[7] and [8] are two recent works that use DDPMs to produce high fidelity audio conditioned on mel-spectrograms. Concurrent to our work, [7] use a combination of improved schedule and $L_1$ loss to allow sampling with fewer steps with very little reduction in sample quality. However, compared to our unconditional image generation task, their generative task has a strong input conditioning signal provided by the mel-spectrograms, and we hypothesize that this makes it easier to sample with fewer diffusion steps.
[6] explored score matching in the image domain, and constructed an adversarial training objective to produce better $x_0$ predictions. However, they found that choosing a better network architecture removed the need for this adversarial objective, suggesting that the adversarial objective is not necessary for powerful generative modeling.
Parallel to our work, [13] and [30] propose fast sampling algorithms for models trained with the DDPM objective by leveraging different sampling processes. [13] does this by deriving an implicit generative model that has the same marginal noise distributions as DDPMs while deterministically mapping noise to images. [30] model the diffusion process as the discretization of a continuous SDE, and observe that there exists an ODE that corresponds to sampling from the reverse SDE. By varying the numerical precision of an ODE solver, they can sample with fewer function evaluations. However, they note that this technique obtains worse samples than ancestral sampling when used directly, and only achieves better FID when combined with Langevin corrector steps. This in turn requires hand-tuning of a signal-to-noise ratio for the Langevin steps. Our method allows fast sampling directly from the ancestral process, which removes the need for extra hyperparameters.
Also in parallel, [36] develops a diffusion model with reverse diffusion steps modeled by an energy-based model. A potential implication of this approach is that fewer diffusion steps should be needed to achieve good samples.
8. Conclusion
Section Summary: Researchers have modified Denoising Diffusion Probabilistic Models (DDPMs) to sample data much faster while improving their log-likelihood scores—essentially how well they capture the true distribution of data—with minimal loss in the quality of generated samples. These changes, including a new way to learn data variability and a hybrid training goal, bring DDPMs closer to other probability-based models and surprisingly allow sampling in far fewer steps. Overall, DDPMs now rival GANs in sample quality but cover more diverse outputs, scale well with more training resources for even better results, making them a strong and efficient option for generative tasks with promising potential for future development.
We have shown that, with a few modifications, DDPMs can sample much faster and achieve better log-likelihoods with little impact on sample quality. The likelihood is improved by learning $\Sigma_{\theta}$ using our parameterization and $L_{\text{hybrid}}$ objective. This brings the likelihood of these models much closer to other likelihood-based models. We surprisingly discover that this change also allows sampling from these models with many fewer steps.
We have also found that DDPMs can match the sample quality of GANs while achieving much better mode coverage as measured by recall. Furthermore, we have investigated how DDPMs scale with the amount of available training compute, and found that more training compute trivially leads to better sample quality and log-likelihood.
The combination of these results makes DDPMs an attractive choice for generative modeling, since they combine good log-likelihoods, high-quality samples, and reasonably fast sampling with a well-grounded, stationary training objective that scales easily with training compute. These results indicate that DDPMs are a promising direction for future research.
Appendix
Section Summary: The appendix details the hyperparameters and architecture modifications for the experiments, including a customized UNet model with multi-head attention and adjusted conditioning for better performance on datasets like ImageNet 64x64 and CIFAR-10, along with training specifics such as optimizers, batch sizes, learning rates, and noise schedules. It also presents results on fast sampling for high-resolution LSUN 256x256 bedroom images, where the proposed hybrid loss model outperforms alternatives like DDIM at more than 50 diffusion steps, especially with larger batch sizes and learning rates. Finally, it compares sample quality on class-conditional ImageNet 256x256, showing that a two-stage diffusion model achieves a strong FID score of 12.3, surpassing single-stage approaches and closing the gap with GANs.
A. Hyperparameters
For all of our experiments, we use a UNet model architecture[^4] similar to that used by [2]. We changed the attention layers to use multi-head attention ([37]), and opted to use four attention heads rather than one (while keeping the same total number of channels). We employ attention not only at the 16x16 resolution, but also at the 8x8 resolution. Additionally, we changed the way the model conditions on $t$. In particular, instead of computing a conditioning vector $v$ and injecting it into hidden state $h$ as $\text{GroupNorm}(h + v)$, we compute conditioning vectors $w$ and $b$ and inject them into the hidden state as $\text{GroupNorm}(h)(w + 1) + b$. We found in preliminary experiments on ImageNet $64 \times 64$ that these modifications slightly improved FID.
[^4]: In initial experiments, we found that a ResNet-style architecture with no downsampling achieved better log-likelihoods but worse FIDs than the UNet architecture.
For ImageNet $64 \times 64$ the architecture we use is described as follows. The downsampling stack performs four steps of downsampling, each with three residual blocks ([38]). The upsampling stack is setup as a mirror image of the downsampling stack. From highest to lowest resolution, the UNet stages use $[C, 2C, 3C, 4C]$ channels, respectively. In our ImageNet $64 \times 64$ ablations, we set $C=128$, but we experiment with scaling $C$ in a later section. We estimate that, with $C=128$, our model is comprised of 120M parameters and requires roughly 39 billion FLOPs in the forward pass.
For our CIFAR-10 experiments, we use a smaller model with three resblocks per downsampling stage and layer widths $[C, 2C, 2C, 2C]$ with $C=128$. We swept over dropout values ${0.1, 0.2, 0.3}$ and found that 0.1 worked best for the linear schedule while 0.3 worked best for our cosine schedule. We expand upon this in Appendix F.
We use Adam ([35]) for all of our experiments. For most experiments, we use a batch size of 128, a learning rate of $10^{-4}$, and an exponential moving average (EMA) over model parameters with a rate of 0.9999. For our scaling experiments, we vary the learning rate to accomodate for different model sizes. For our larger class-conditional ImageNet $64 \times 64$ experiments, we scaled up the batch size to 2048 for faster training on more GPUs.
When using the linear noise schedule from [2], we linearly interpolate from $\beta_1=0.0001/4$ to $\beta_{4000}=0.02/4$ to preserve the shape of $\bar{\alpha}_t$ for the $T=4000$ schedule.
When computing FID we produce 50K samples from our models, except for unconditional ImageNet $64 \times 64$ where we produce 10K samples. Using only 10K samples biases the FID to be higher, but requires much less compute for sampling and helps do large ablations. Since we mainly use FID for relative comparisons on unconditional ImageNet $64 \times 64$, this bias is acceptable. For computing the reference distribution statistics we follow prior work ([2, 31]) and use the full training set for CIFAR-10 and ImageNet, and 50K training samples for LSUN. Note that unconditional ImageNet $64 \times 64$ models are trained and evaluated using the official ImageNet-64 dataset [39], whereas for class conditional ImageNet $64 \times 64$ and $256 \times 256$ we center crop and area downsample images [31].
B. Fast Sampling on LSUN $256 \times 256$
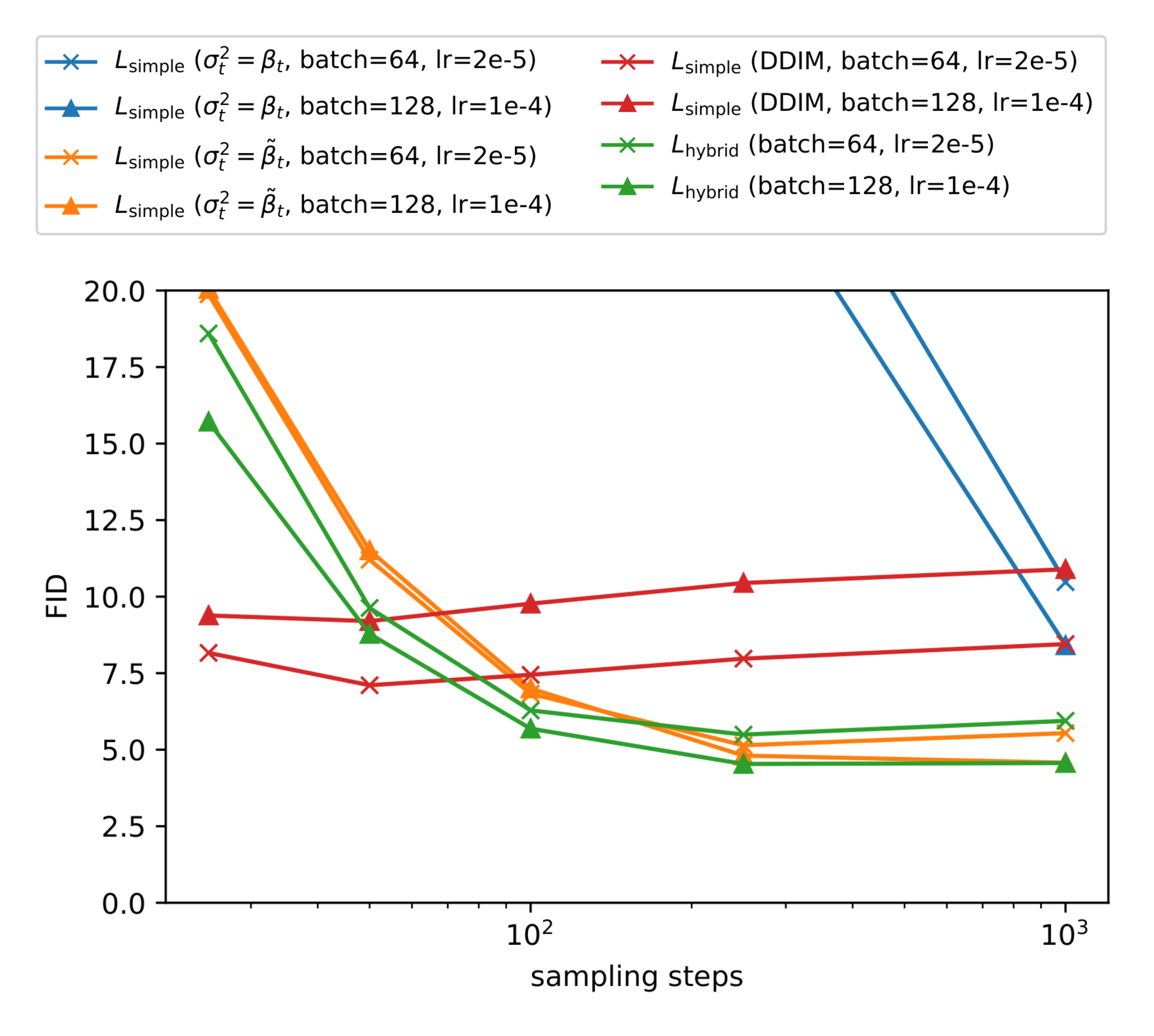
To test the effectiveness of our $L_{\text{hybrid}}$ models on a high-resolution domain, we trained both $L_{\text{hybrid}}$ and $L_{\text{simple}}$ models on the LSUN bedroom ([12]) dataset. We train two models: one with batch size 64 and learning rate $2 \times 10^{-5}$ as in [2], and another with a larger batch size 128 and learning rate $10^{-4}$. All models were trained with 153.6M examples, which is 2.4M training iterations with batch size 64.
Our results are displayed in Figure 11. We find that DDIM outperforms our $L_{\text{hybrid}}$ model when using fewer than 50 diffusion steps, while our $L_{\text{hybrid}}$ model outperforms DDIM with more than 50 diffusion steps. Interestingly, we note that DDIM benefits from a smaller learning rate and batch size, whereas our method is able to take advantage of a larger learning rate and batch size.
C. Sample Quality on ImageNet $256 \times 256$
We trained two models on class conditional ImageNet $256 \times 256$. The first is a usual diffusion model that directly models the $256 \times 256$ images. The second model reduces compute by chaining a pretrained $64 \times 64$ model $p(x_{64}|y)$ with another upsampling diffusion model $p(x_{256}|x_{64}, y)$ to upsample images to $256 \times 256$. For the upsampling model, the downsampled image $x_{64}$ is passed as extra conditioning input to the UNet. This is similar to VQ-VAE-2 ([18]), which uses two stages of priors at different latent resolutions to more efficiently learn global and local features. The linear schedule worked better for $256 \times 256$ images, so we used that for these results. Table 5 summarizes our results. For VQ-VAE-2, we use the FIDs reported in [40]. Diffusion models still obtain the best FIDs for a likelihood-based model, and close the gap to GANs considerably.
Table 5: Sample quality comparison on class conditional ImageNet $256 \times 256$. BigGAN FIDs are reported for the truncation that results in the best FID.
| MODEL | FID |
|---|---|
| VQ-VAE-2 ([18], two-stage) | 38.1 |
| Improved Diffusion (ours, single-stage) | 31.5 |
| Improved Diffusion (ours, two-stage) | 12.3 |
| BigGAN ([31]) | 7.7 |
| BigGAN-deep ([31]) | 7.0 |

D. Combining $L_{\text{hybrid}}$ and $L_{\text{vlb}}$ Models
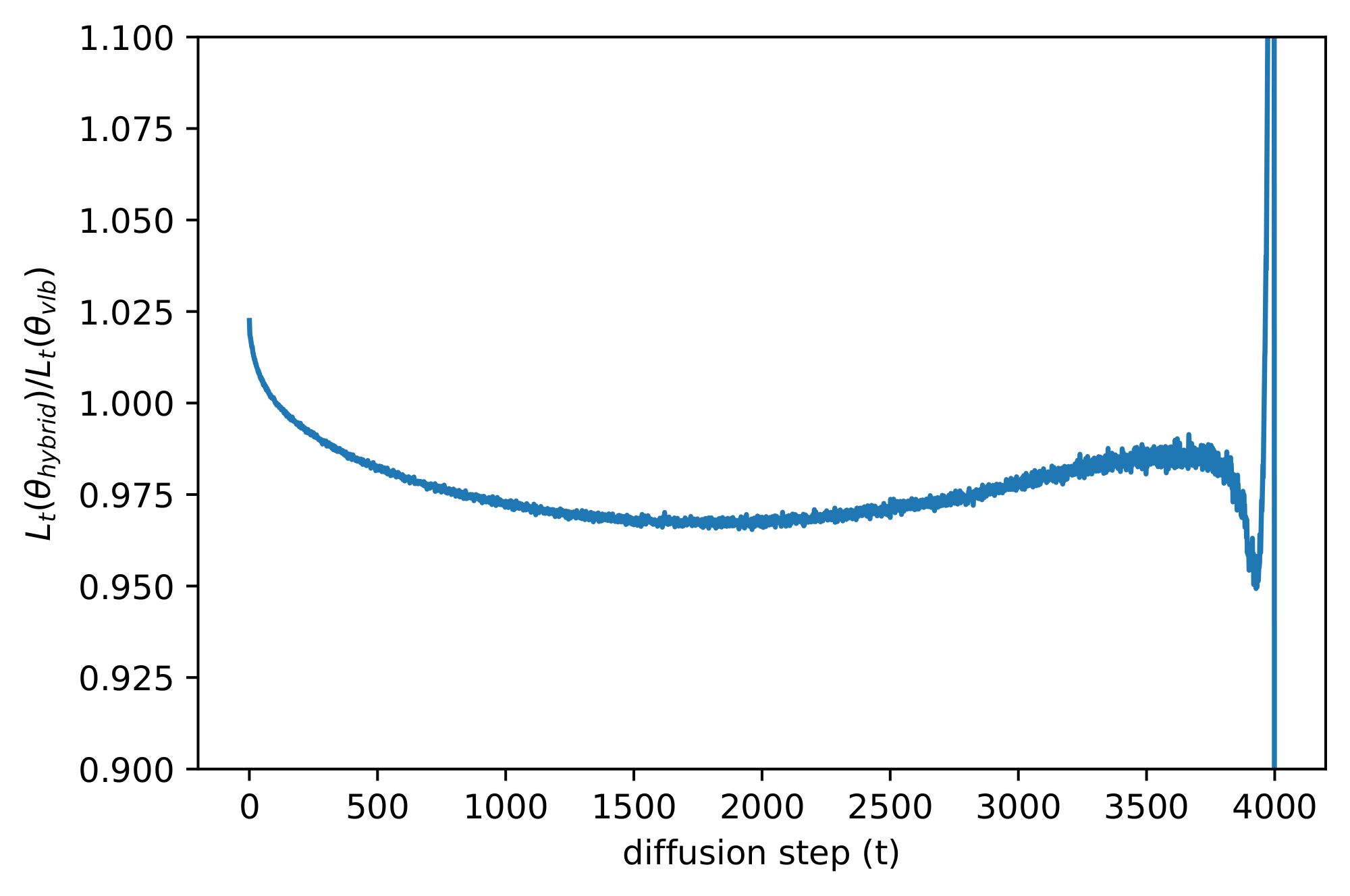

To understand the trade-off between $L_{\text{hybrid}}$ and $L_{\text{vlb}}$, we show in Figure 13 that the model resulting from $L_{\text{vlb}}$ (referred to as $\theta_{\text{vlb}}$) is better at the start and end of the diffusion process, while the model resulting from $L_{\text{hybrid}}$ (referred to as $\theta_{\text{hybrid}}$) is better throughout the middle of the diffusion process. This suggests that $\theta_{\text{vlb}}$ is focusing more on imperceptible details, hence the lower sample quality.
Given the above observation, we performed an experiment on ImageNet $64 \times 64$ to combine the two models by constructing an ensemble that uses $\theta_{\text{hybrid}}$ for $t \in [100, T-100)$ and $\theta_{\text{vlb}}$ elsewhere. We found that this model achieved an FID of 19.9 and an NLL of 3.52 bits/dim. This is only slightly worse than $\theta_{\text{hybrid}}$ in terms of FID, while being better than both models in terms of NLL.
E. Log-likelihood with Fewer Diffusion Steps
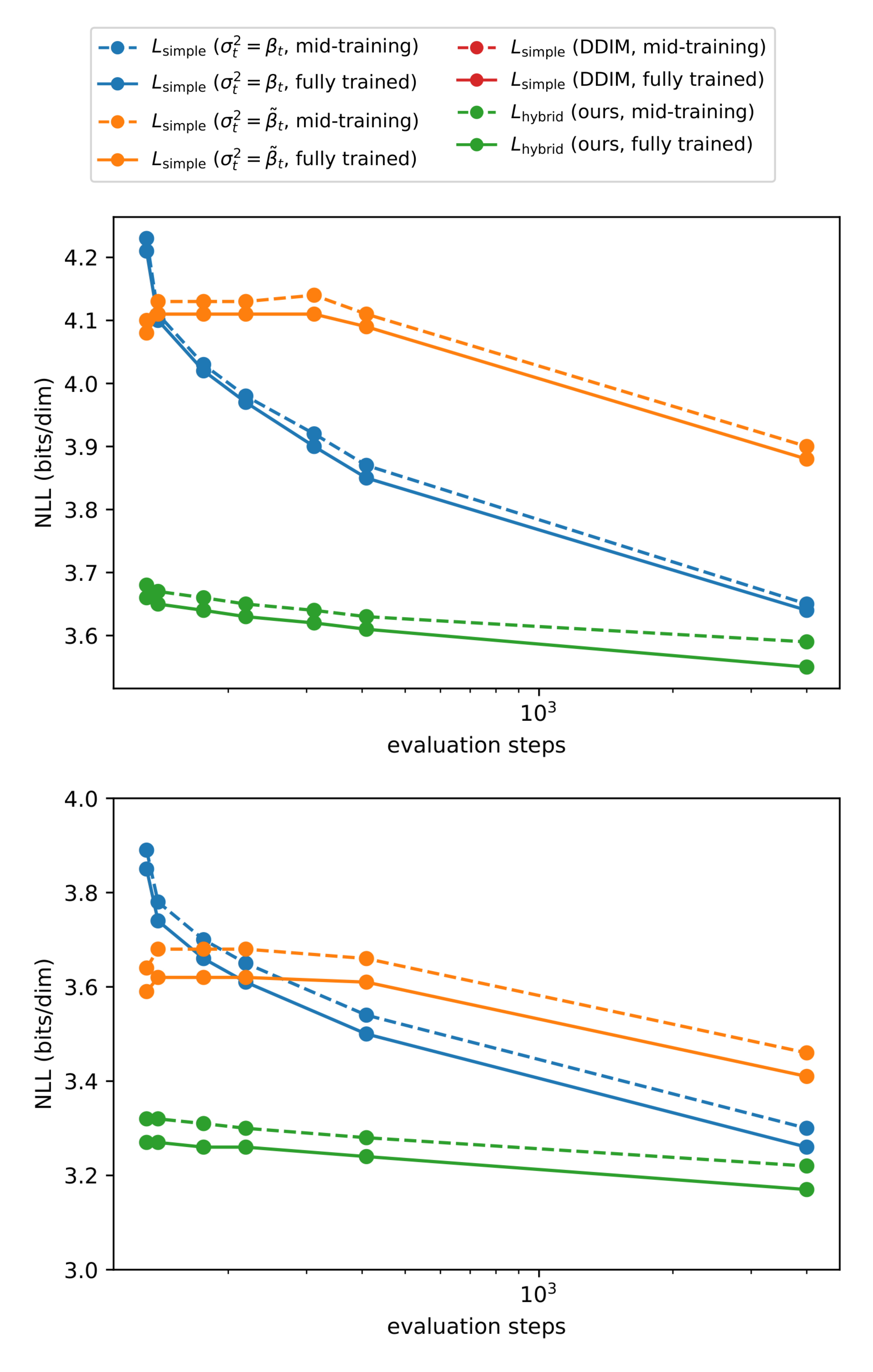
Figure 15 plots negative log-likelihood as a function of number of sampling steps for both ImageNet $64 \times 64$ and CIFAR-10. In initial experiments, we found that although constant striding did not significantly affect FID, it drastically reduced log-likelihood. To address this, we use a strided subset of timesteps as for FID, but we also include every $t$ from 1 to $T/K$. This requires $T/K$ extra evaluation steps, but greatly improves log-likelihood compared to the uniformly strided schedule. We did not attempt to calculate NLL using DDIM, since [13] does not present NLL results or a simple way of estimating likelihood under DDIM.
F. Overfitting on CIFAR-10
::::
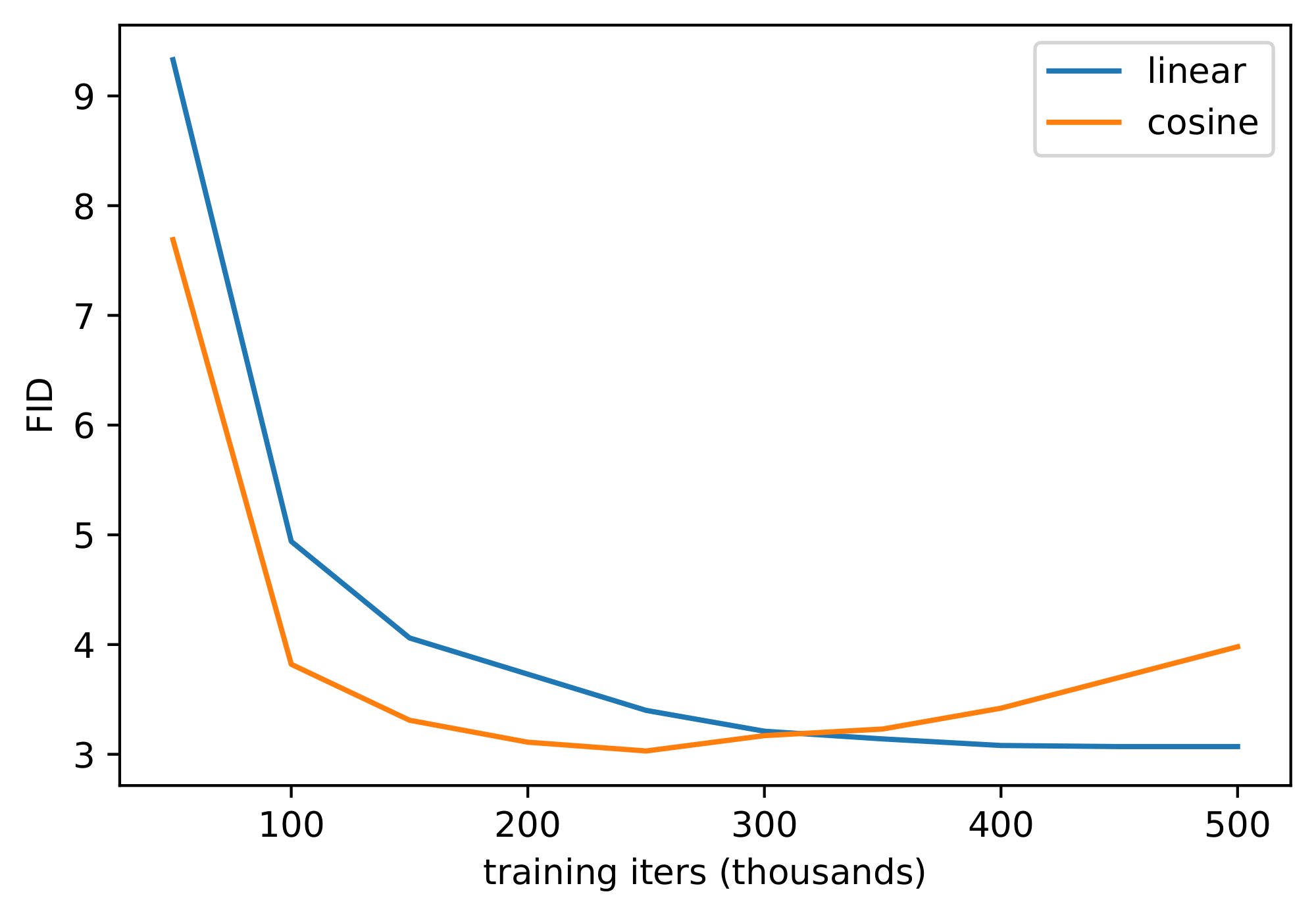
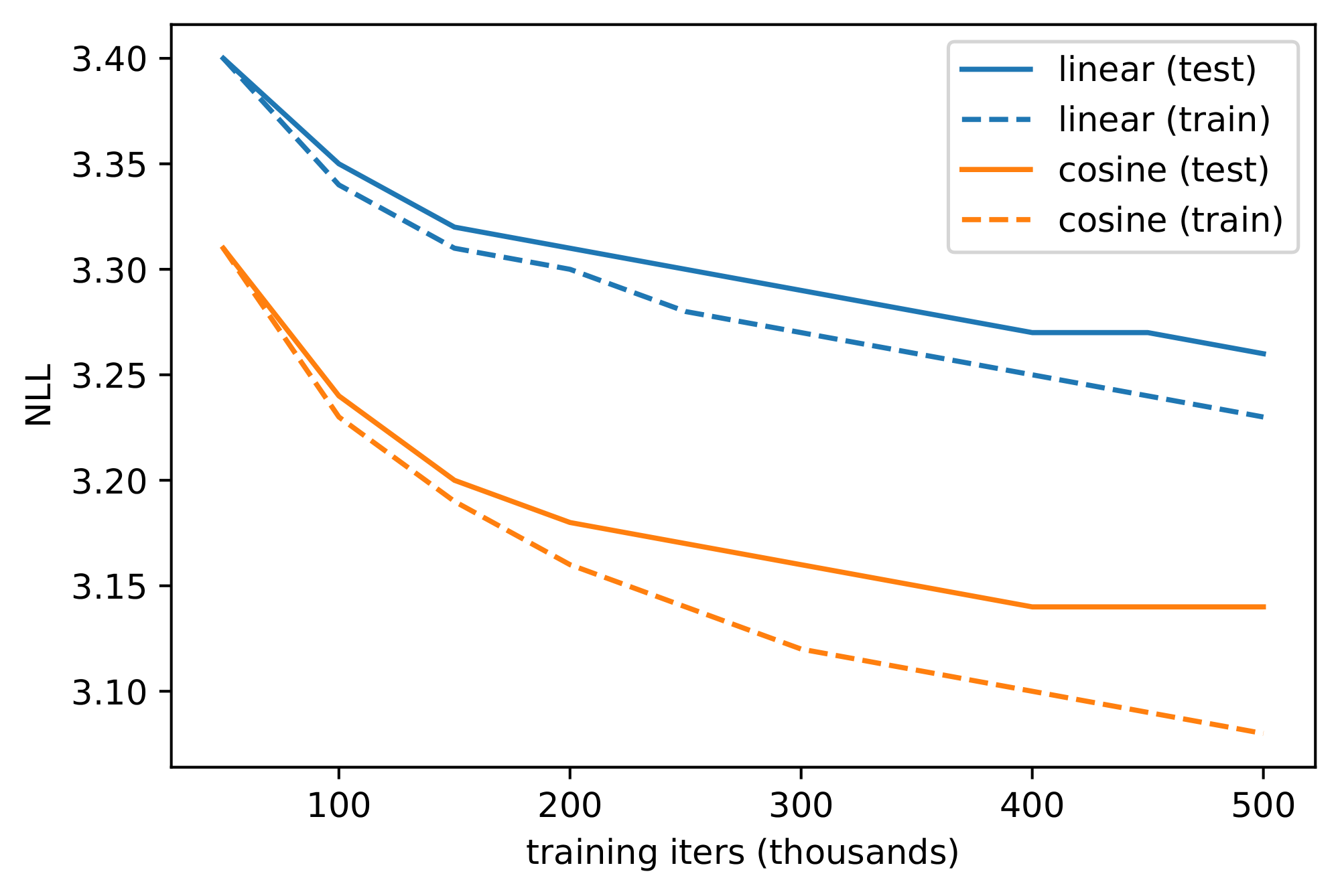
Figure 16: FID (top) and NLL (bottom) over the course of training for two CIFAR-10 models, both with dropout 0.1. The model trained with the linear schedule learns more slowly, but does not overfit as quickly. When too much overfitting occurs, we observed overfitting artifacts similar to those from [41], which is reflected by increasing FID. ::::
On CIFAR-10, we noticed that all models overfit, but tended to reach similar optimal FID at some point during training. Holding dropout constant, we found that models trained with our cosine schedule tended to reach optimal performance (and then overfit) more quickly than those trained with the linear schedule (Figure 16). In our experiments, we corrected for this difference by using more dropout for our cosine models than the linear models. We suspect that the overfitting from the cosine schedule is either due to 1) less noise in the cosine schedule providing less regularization, or 2) the cosine schedule making optimization, and thus overfitting, easier.
G. Early stopping for FID
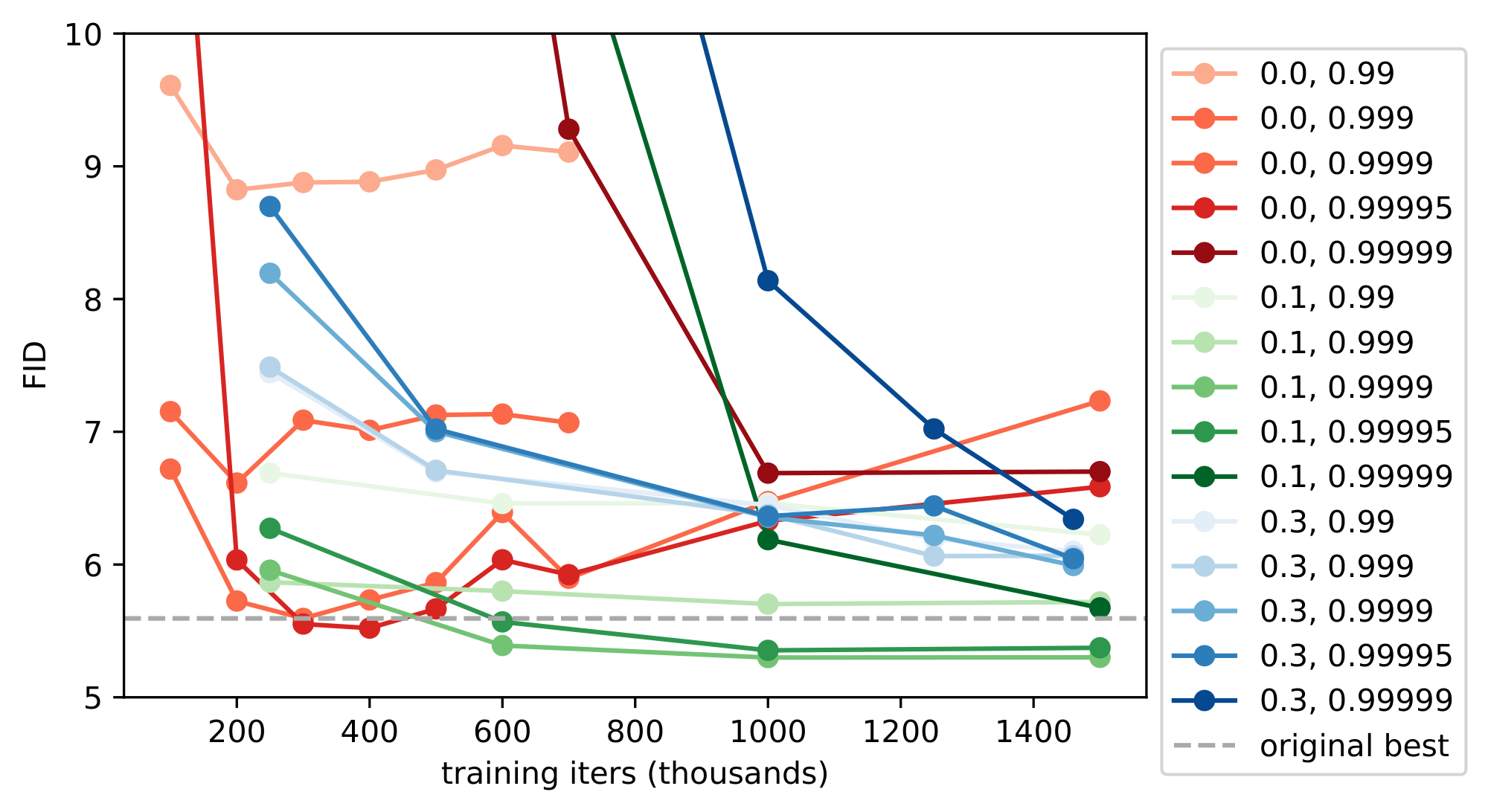
Like on CIFAR-10, we surprisingly observed overfitting on class-conditional ImageNet $64 \times 64$, despite it being a much larger and more diverse dataset. The main observable result of this overfitting was that FID started becoming worse over the course of training. We initially tried a sweep (Figure 17) over the EMA hyperparameter to make sure it was well tuned, and found that 0.9999 and 0.99995 worked best. We then tried runs with dropout 0.1 and 0.3, and found that models with a small amount of dropout improved the best attainable FID but took longer to get to the same performance and still eventually overfit. We concluded that the best way to train, given what we know, is to early stop and instead increase model size if we want to use additional training compute.
H. Samples with Varying Steps and Objectives
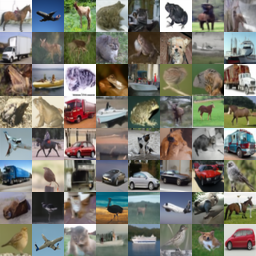
Figure 18 through Figure 23 show unconditional ImageNet $64 \times 64$ samples as we reduce number of sampling steps for an $L_{\text{hybrid}}$ model with $4K$ diffusion steps trained for 1.5M training iterations.
Figure 24 through Figure 29 show unconditional CIFAR-10 samples as we reduce number of sampling steps for an $L_{\text{hybrid}}$ model with $4K$ diffusion steps trained for 500K training iterations.
Figure 30 and Figure 31 highlight the difference in sample quality between models trained with $L_{\text{hybrid}}$ and $L_{\text{vlb}}$.


References
[1] Sohl-Dickstein, J., Weiss, E. A., Maheswaranathan, N., and Ganguli, S. Deep unsupervised learning using nonequilibrium thermodynamics, 2015.
[2] Ho, J., Jain, A., and Abbeel, P. Denoising diffusion probabilistic models, 2020.
[3] Song, Y. and Ermon, S. Generative modeling by estimating gradients of the data distribution. In Advances in Neural Information Processing Systems, pp.\ 11918–11930, 2019.
[4] Song, Y. and Ermon, S. Improved techniques for training score-based generative models. arXiv preprint arXiv:2006.09011, 2020.
[5] Hyvärinen, A. Estimation of non-normalized statistical models by score matching. Journal of Machine Learning Research, 6(Apr):695–709, 2005.
[6] Jolicoeur-Martineau, A., Piché-Taillefer, R., des Combes, R. T., and Mitliagkas, I. Adversarial score matching and improved sampling for image generation, 2020.
[7] Chen, N., Zhang, Y., Zen, H., Weiss, R. J., Norouzi, M., and Chan, W. Wavegrad: Estimating gradients for waveform generation, 2020b.
[8] Kong, Z., Ping, W., Huang, J., Zhao, K., and Catanzaro, B. Diffwave: A versatile diffusion model for audio synthesis, 2020.
[9] van den Oord, A., Kalchbrenner, N., Vinyals, O., Espeholt, L., Graves, A., and Kavukcuoglu, K. Conditional image generation with pixelcnn decoders, 2016c.
[10] Kingma, D. P. and Welling, M. Auto-encoding variational bayes, 2013.
[11] Krizhevsky, A. Learning multiple layers of features from tiny images, 2009. URL http://www.cs.toronto.edu/~kriz/learning-features-2009-TR.pdf.
[12] Yu, F., Seff, A., Zhang, Y., Song, S., Funkhouser, T., and Xiao, J. Lsun: Construction of a large-scale image dataset using deep learning with humans in the loop, 2015.
[13] Song, J., Meng, C., and Ermon, S. Denoising diffusion implicit models, 2020a.
[14] Kynkäänniemi, T., Karras, T., Laine, S., Lehtinen, J., and Aila, T. Improved precision and recall metric for assessing generative models, 2019.
[15] Henighan, T., Kaplan, J., Katz, M., Chen, M., Hesse, C., Jackson, J., Jun, H., Brown, T. B., Dhariwal, P., Gray, S., Hallacy, C., Mann, B., Radford, A., Ramesh, A., Ryder, N., Ziegler, D. M., Schulman, J., Amodei, D., and McCandlish, S. Scaling laws for autoregressive generative modeling, 2020.
[16] Heusel, M., Ramsauer, H., Unterthiner, T., Nessler, B., and Hochreiter, S. Gans trained by a two time-scale update rule converge to a local nash equilibrium. Advances in Neural Information Processing Systems 30 (NIPS 2017), 2017.
[17] Salimans, T., Goodfellow, I., Zaremba, W., Cheung, V., Radford, A., and Chen, X. Improved techniques for training gans, 2016.
[18] Razavi, A., van den Oord, A., and Vinyals, O. Generating diverse high-fidelity images with vq-vae-2, 2019.
[19] van den Oord, A., Kalchbrenner, N., Vinyals, O., Espeholt, L., Graves, A., and Kavukcuoglu, K. Conditional image generation with pixelcnn decoders, 2016b. URL http://image-net.org/small/download.php.
[20] Menick, J. and Kalchbrenner, N. Generating high fidelity images with subscale pixel networks and multidimensional upscaling, 2018.
[21] Child, R., Gray, S., Radford, A., and Sutskever, I. Generating long sequences with sparse transformers, 2019.
[22] Roy, A., Saffar, M., Vaswani, A., and Grangier, D. Efficient content-based sparse attention with routing transformers, 2020.
[23] McCandlish, S., Kaplan, J., Amodei, D., and Team, O. D. An empirical model of large-batch training, 2018.
[24] Kingma, D. P. and Dhariwal, P. Glow: Generative flow with invertible 1x1 convolutions. In Advances in neural information processing systems, pp.\ 10215–10224, 2018.
[25] Ho, J., Chen, X., Srinivas, A., Duan, Y., and Abbeel, P. Flow++: Improving flow-based generative models with variational dequantization and architecture design. arXiv preprint arXiv:1902.00275, 2019.
[26] Vahdat, A. and Kautz, J. Nvae: A deep hierarchical variational autoencoder. arXiv preprint arXiv:2007.03898, 2020.
[27] Child, R. Very deep vaes generalize autoregressive models and can outperform them on images. arXiv preprint arXiv:2011.10650, 2020.
[28] Chen, X., Mishra, N., Rohaninejad, M., and Abbeel, P. Pixelsnail: An improved autoregressive generative model. In International Conference on Machine Learning, pp.\ 864–872. PMLR, 2018.
[29] Parmar, N., Vaswani, A., Uszkoreit, J., Kaiser, Ł., Shazeer, N., Ku, A., and Tran, D. Image transformer. arXiv preprint arXiv:1802.05751, 2018.
[30] Song, Y., Sohl-Dickstein, J., Kingma, D. P., Kumar, A., Ermon, S., and Poole, B. Score-based generative modeling through stochastic differential equations, 2020b.
[31] Brock, A., Donahue, J., and Simonyan, K. Large scale gan training for high fidelity natural image synthesis. arXiv preprint arXiv:1809.11096, 2018.
[32] Kaplan, J., McCandlish, S., Henighan, T., Brown, T. B., Chess, B., Child, R., Gray, S., Radford, A., Wu, J., and Amodei, D. Scaling laws for neural language models, 2020.
[33] Chen, M., Radford, A., Child, R., Wu, J., Jun, H., Dhariwal, P., Luan, D., and Sutskever, I. Generative pretraining from pixels, 2020a. URL https://cdn.openai.com/papers/Generative_Pretraining_from_Pixels_V2.pdf.
[34] Brown, T. B., Mann, B., Ryder, N., Subbiah, M., Kaplan, J., Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G., Askell, A., Agarwal, S., Herbert-Voss, A., Krueger, G., Henighan, T., Child, R., Ramesh, A., Ziegler, D. M., Wu, J., Winter, C., Hesse, C., Chen, M., Sigler, E., Litwin, M., Gray, S., Chess, B., Clark, J., Berner, C., McCandlish, S., Radford, A., Sutskever, I., and Amodei, D. Language models are few-shot learners, 2020.
[35] Kingma, D. P. and Ba, J. Adam: A method for stochastic optimization, 2014.
[36] Gao, R., Song, Y., Poole, B., Wu, Y. N., and Kingma, D. P. Learning energy-based models by diffusion recovery likelihood, 2020.
[37] Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones, L., Gomez, A. N., Kaiser, L., and Polosukhin, I. Attention is all you need, 2017.
[38] He, K., Zhang, X., Ren, S., and Sun, J. Deep residual learning for image recognition, 2015.
[39] van den Oord, A., Kalchbrenner, N., and Kavukcuoglu, K. Pixel recurrent neural networks, 2016a.
[40] Ravuri, S. and Vinyals, O. Classification accuracy score for conditional generative models. arXiv preprint arXiv:1905.10887, 2019.
[41] Salimans, T., Karpathy, A., Chen, X., and Kingma, D. P. Pixelcnn++: Improving the pixelcnn with discretized logistic mixture likelihood and other modifications, 2017.